共創で日本をステップさせるメディアプロジェクト
- 総合TOP
- 宇宙
- AI
- ロボット
- WEB3・メタバース

2026.08.03
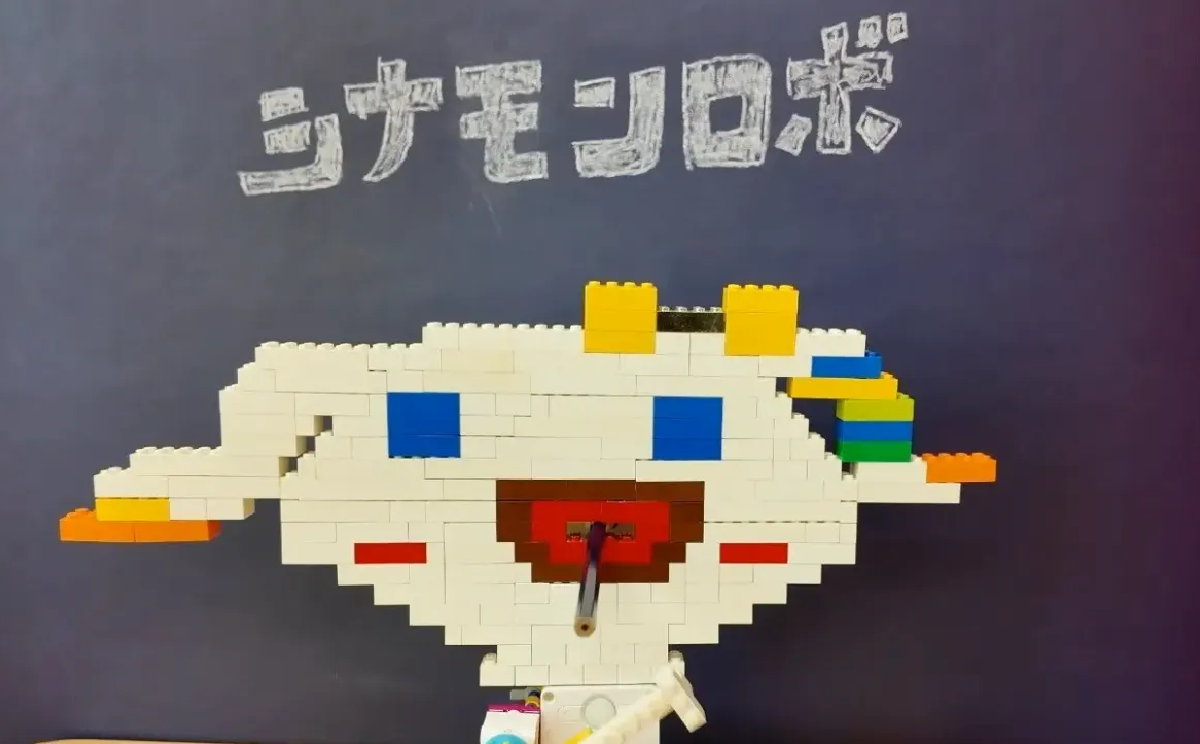
ロボットと餅をつく。伝統を守る協調の形
振り下ろされる重い杵と、素早く餅を返す手。わずかなタイミングのずれが大事故につながる餅つきは、互いの呼吸を読み合う高度な信頼関係の結晶だ。いま、この熟練の協調作業にヒューマノイドロボットが挑んでいる。人間の仕事を単に肩代わりするのではなく、人の動きに寄り添い、共に働く。ハッカソンで高く評価された新たなアプローチは、失われつつある日本の職人技を次世代へつなぐ希望となるのか。(文=RoboStep編集部)
2026.07.31
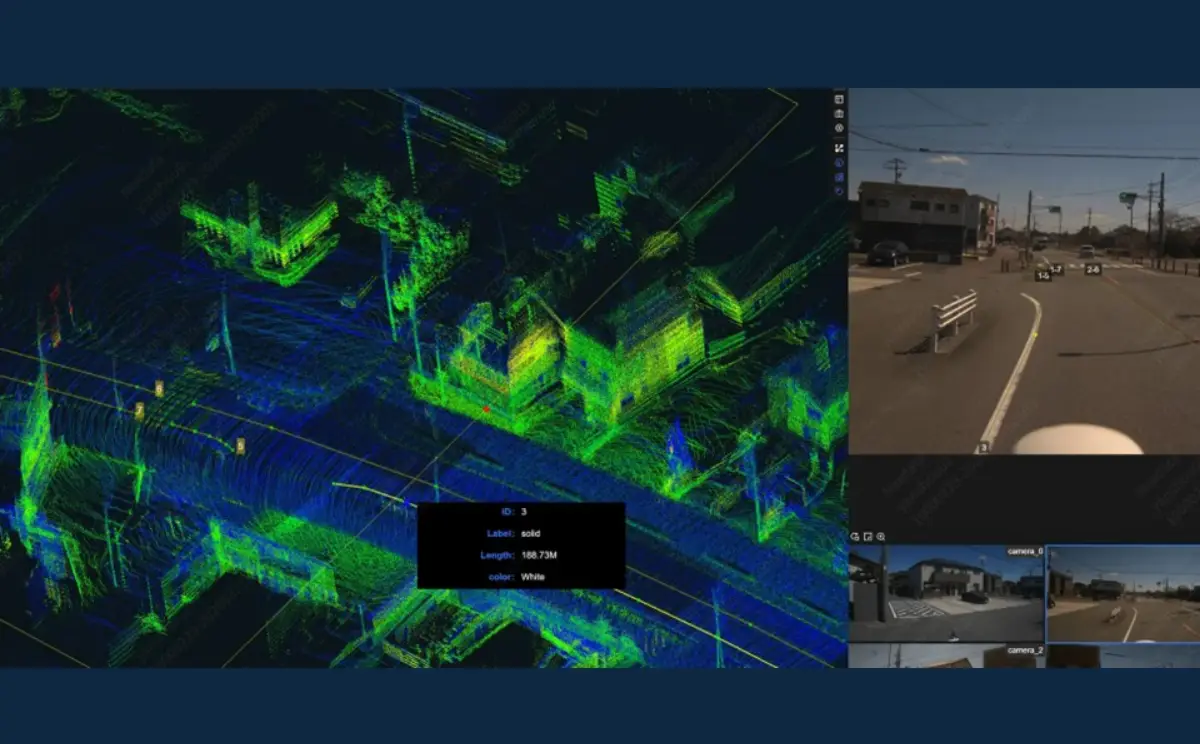
日本の道をAIに。自動運転データセットの衝撃

2026.07.30
ロボットが「汎用的な労働力」になる。フィジカルAIが変える現場の常識

2026.07.29
ミリ秒の制御が拓く。自律型工場の新基準

2026.07.28
トヨタを走る400台。工場物流無人化の真価

2026.07.27
自律ロボとからくり。運搬作業ゼロへの道

2026.07.24
人間と働くフィジカルAI。次世代の倉庫

2026.07.23
ロボットがエレベーターを乗りこなす時代へ
2026.07.22
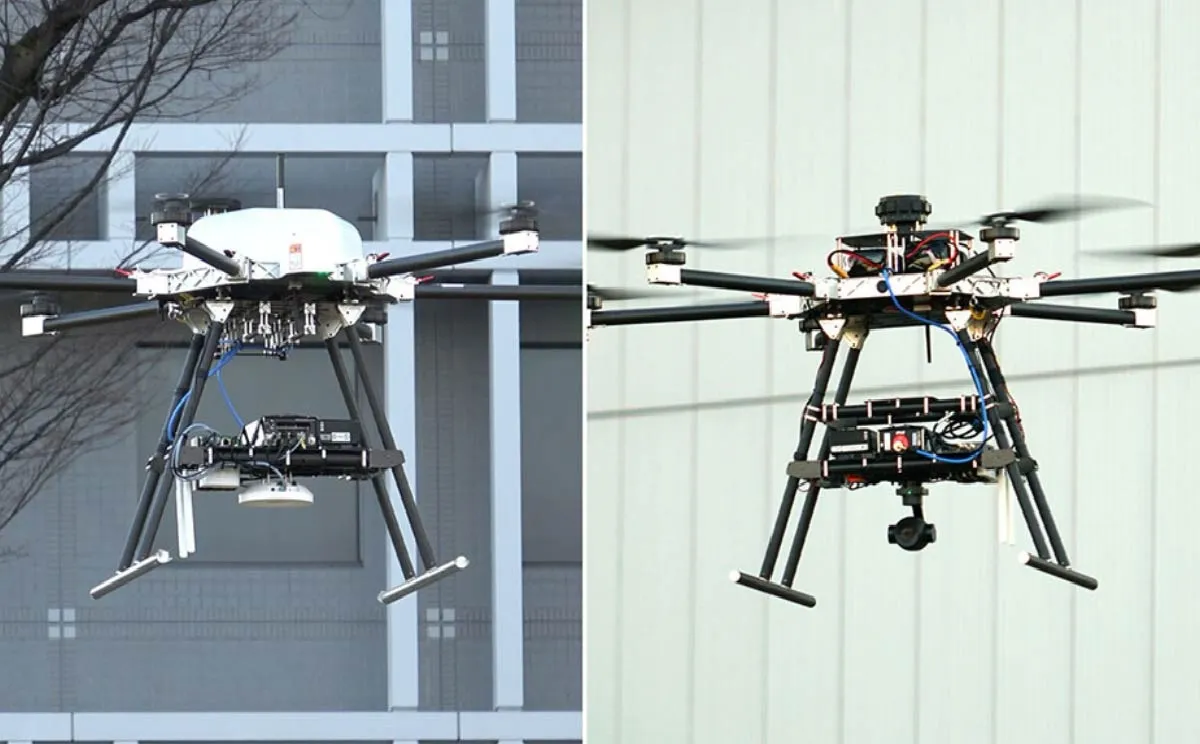
ドローンが通信インフラへ進化!? NHKの伝送技術で災害時に活躍

2026.07.21
操縦者はいらない。ドローンポートが拓く自動化


連載コラム


農林水産

中山間地を救う。次世代の農業ロボット
2026.06.25

水田の除草をロボットで。農水省が認めた自動抑草
2026.06.18

フィリピンのバナナ農園で、安定供給を“空”から見守る!
2026.05.22
フードテック


製造・物流

医療・介護・福祉

「歩くことを諦めない社会」韓国発の補助機器が“歩行革命”を起こす
2026.07.10

盲導犬不足に挑む。対話型ロボット犬の開発
2026.06.24

事故現場で動けるか。ドローン救護が業界標準
2026.05.19
システム

ロボットの「遅延ゼロ」へ!フィジカルAI時代の新制御
2026.06.26

仮想空間で特訓。非定型をこなすAIロボ
2026.03.30

AI規制を踏まえた説明可能AI(XAI)の重要性について
2025.01.16
防災・警備


宇宙

宇宙ビジネスは誰にでも道が拓ける
2025.11.26

大阪・関西万博で初披露 月面AIロボット「つきかけ」に来場者が熱視線
2025.08.08

「宇宙ロボット」を知る!拡大する宇宙ビジネスと無人化のニーズ
2025.05.13
コンサルティング



点検・保守・清掃



サービス

人間が「贅沢品」になる。おもてなしの二層構造
2026.07.03

ソフトウェア会社が熾烈な配膳ロボット市場に参入。つかんだ“泥臭い”勝ち筋とは
2026.03.02

万博でアバターロボが活躍!遠隔地のオペレーターが多言語に対応
2025.09.08
エンタテイメント

ロボットが共通言語に。国境を越える熱狂
2026.04.07

AIと奏でる。楽器ロボが拓く音楽の共体験
2026.03.31

「第一印象」を設計する——外装から考えるロボット実装論
2026.01.30
技術トレンド
日本の道をAIに。自動運転データセットの衝撃
2026.07.31
ロボットが「汎用的な労働力」になる。フィジカルAIが変える現場の常識
2026.07.30
ミリ秒の制御が拓く。自律型工場の新基準
2026.07.29
業界動向

人を増やさず現場を回す。愛知県発、自律化の新たなビジョン
2026.05.12
自ら考え形にする。小学生のロボット教育
2026.05.11

「課題先進国」日本、ロボット戦略に見えた「AI×現場知」の勝ち筋
2026.05.07
初心者向け
欠かせないロボットの感覚器官「センサー技術」について知る
2025.06.17

改めて「ドローン」について学ぶ!産業現場で活躍する無人航空機の基本と活用法
2025.06.16

記事まとめ・お知らせ

新メディア『JapanStep』『SpaceStep』が創刊しました
2025.11.26

『MetaStep Magazine 2025 Autumn』発売中!
2025.09.02
業界団体・研究機関



【連載】自由に働ける社会を「遠隔就労」がつくる!(第1回)
2025.06.09
製品・サービス・技術を探す

中国EV・モビリティ視察ツアー
2025.10.31

【ROS対応】 可搬重量約40kgの全方向移動台車ロボット
2025.08.25

極限進化したRomi。もはや、それは家族。
2025.06.02
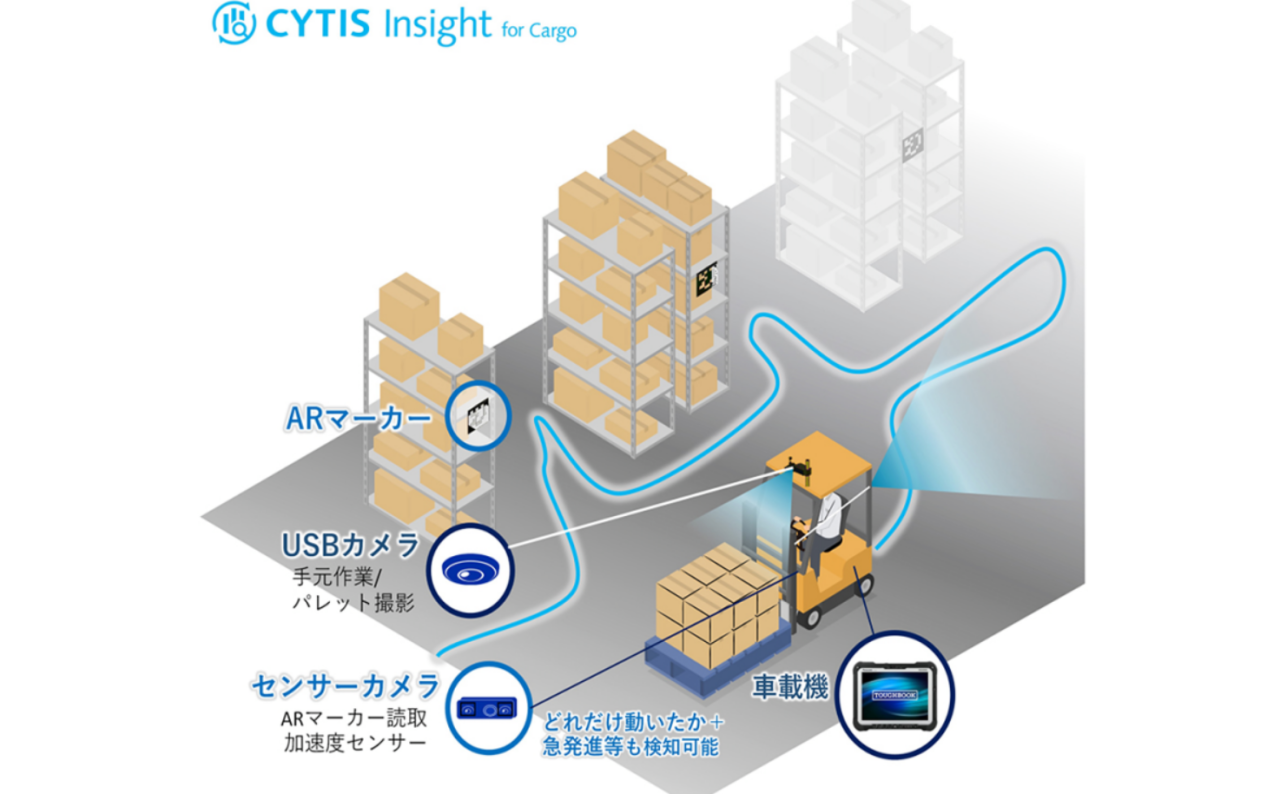
生産性が低い作業を可視化し、さらなる「改善」を実現
2025.03.31

遠く離れていても、すぐそばにいることができる。それがOhmni(オムニ)。
2025.03.17

段ボール積み付け作業を自動化する小型の協働ロボット
2025.02.14

AIとクラウド技術で収穫作業の効率化を実現、人手不足解消に貢献
2025.02.12


【ROS対応】 可搬重量約40kg、大幅な静音化を実現した二輪駆動台車ロボット
2025.01.14
人気連載コラム




お知らせ

ピックアップ

SPECIAL ISSUE


「JapanStep Media Project」は
企業・団体様に参画頂き、共創するメディアプラットフォームです。
-
パートナー企業・団体(ABC順)
-
-
後援(ABC順)
-
-
提携メディア(ABC順)
-






























































































































































































































TOPへ

![]()
総合TOP
![]()
![]()
![]()
![]()
© JMP (JapanStep Media Project) All Rights Reserved.