- 総合TOP
- 宇宙
- AI
- ロボット
- WEB3・メタバース
ロボットや産業機器の「制御技術」に目を向ける機会は、技術者を除くと多くはない。しかし、機械がどのように動き、正確な動作を実現しているのかを知ることは、ロボットの可能性や進化の本質を理解することにもつながる。
なかでも、フィジカルAIへの注目が高まる今、その重要性がさらに増している制御機器の一つが「モーションコントローラ」だ。一般にはあまり知られていない存在だが、ロボットや産業機器の動きを支える“縁の下の力持ち”として、最先端の自動化や知能化を支える重要な役割を担っている。
そして今、このモーションコントローラは大きな進化の節目を迎えている。従来のハードウエア中心の常識を覆し、新しい仕組みによって、より柔軟で高度な制御を実現する時代が始まりつつある。
今回は、長年にわたりモーション制御の最前線で開発に携わってきたモベンシス株式会社にインタビューを実施。モーションコントローラの基礎から、フィジカルAI時代に求められる新たな制御技術、そして次世代に向けた歩みについて話を聞いた。(文=RoboStep編集部)
お話を伺ったのは

モベンシス株式会社
副社長 兼 技術営業部長 本間 広光さん(右)
開発部 ソフトウエアエンジニア 宮田 零士さん(左)
見えない主役がものづくりを支える
モーションコントローラとは、機械の内部にある「モータの動き」を精密にコントロールするための専用コンピュータだ。工場全体のまとめ役であるPLC(=制御装置Programmable Logic Controller)と連動し、工場内の機器を動かしている。
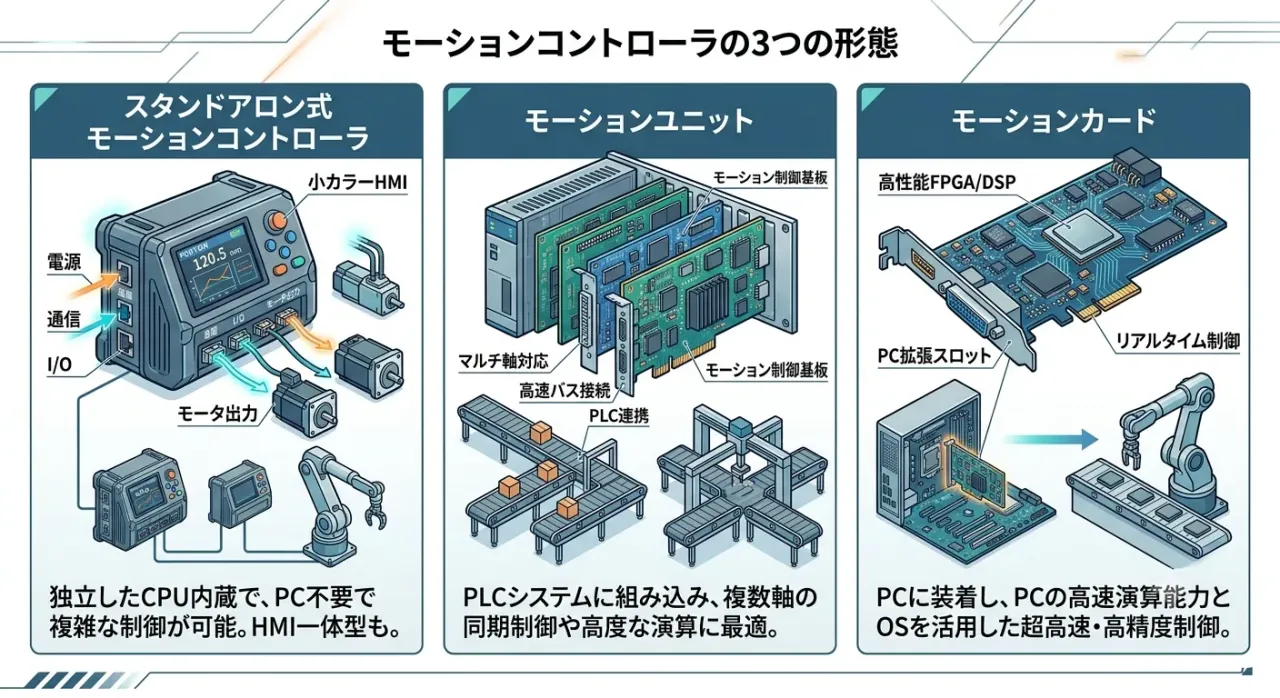
コントローラというと、テレビゲームのように、手で持ってボタンやスイッチが並んだデバイスをイメージするが、実際は使い道によって3つの形に分かれている。
 (Geminiにて生成)
(Geminiにて生成)
1.スタンドアロン式モーションコントローラ
専用コントローラ単体でモータ制御を行うタイプ。PCやPLCに依存せず、複数のモータの位置決めや同期制御を内部で処理できる。装置全体の指令はPLCや上位装置から受け取り、モータの細かな動きはコントローラ側で実行する。包装機、印刷機、精密組立装置、検査装置などで使われる。
2. モーションユニット(PLC組み込み型)
PLCシステムに組み込んで使うタイプ。PLCが装置全体のシーケンス制御やI/O制御※を担い、モーションユニットが複数軸の位置決めや同期制御を担当する。センサーやスイッチ、搬送機構などと連携しやすく、生産ラインや物流設備、工作機械などで使われる。
※シーケンス制御:あらかじめ決められた順序や条件に従って動作を進める制御方式
※I/O制御:PLCなどの制御装置がセンサー等の外部機器から信号を読み取り(Input)、モーター等の駆動機器へ指令を出す(Output)ための入出力処理
3. モーションカード(PC拡張ボード型)
PCに専用ボードを挿入して使うタイプ。PC側で画像処理やデータ処理、装置管理を行い、モーションカード側で高速・高精度なモータ制御を実行する。画像処理や高度な演算とモーション制御を連携させたい半導体製造装置、精密検査装置、電子部品製造装置などで使われる。
宮田さんはこう解説する。「工場全体を人間として捉えたとき、ロジックを組むのが『脳』だとすれば、実際にベルトコンベアやロボットを動かすモータは『筋肉』。この連動が正しくかみ合うことで、工場は物を生産することができます。そしてモーションコントローラは、脳からの指令を周期的かつ確実に筋肉へ伝えるための『神経回路』の役割を担っています」(宮田さん)。この「神経回路」が、意図した動作を100%確実に、かつ高精度に実行させることで、初めて高度な産業機器は機能し、工場が稼働するのだ。
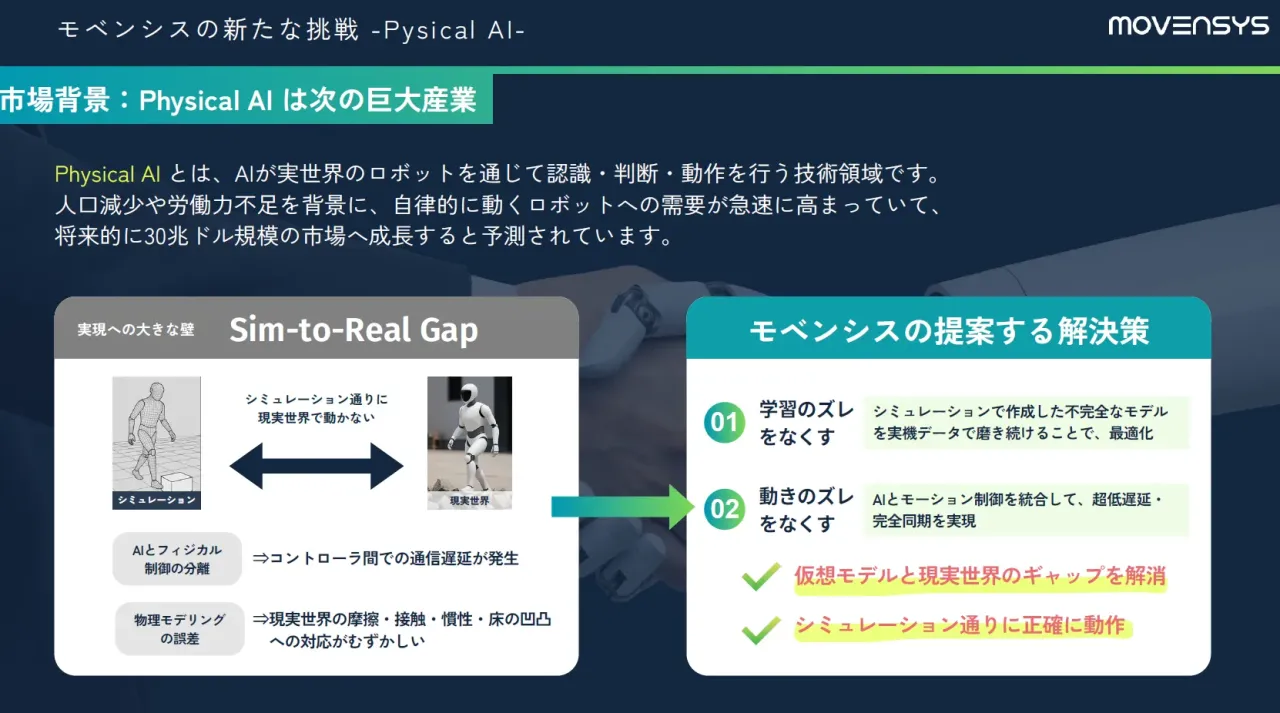
そして、この神経回路の重要性は、フィジカルAIの時代にさらに高まっている。AIがカメラやセンサーから周囲の状況を認識し、次に取るべき動作を判断する。しかし、その判断を実際の機械の動きに変えるためには、モータを正確に、遅れなく動かす制御技術が不可欠だ。
 モベンシス株式会社 開発部 ソフトウエアエンジニア 宮田 零士さん
モベンシス株式会社 開発部 ソフトウエアエンジニア 宮田 零士さん
ミリ秒の遅れが命取り。フィジカルAI時代の制御課題
AIを処理する高性能PCと、ロボットを動かすモーションコントローラの連携にも課題がある。例えばAIから機器へ『関節を20°曲げる』という動作指示を出したとしても、指示してから数秒経過したあとに動いては意味がない。
実際に、AIを担当するパソコンと従来型のロボットコントローラを接続するときに、通信の関係でこのような問題が発生することがあるという。
宮田さんはこれを「バッティング」の例で説明する。「例えばバッティングを行うロボットがいるとします。まず、カメラ等の外部センサーの情報をもとに、プロセッサが計算を行い、打ち返すための動作を生成します。しかし、いかにその動作が完璧だったとしても、その指令がロボットコントローラに届くまでに遅延があると、実行する頃にはもうボールはミットの中に入っています。これでは素早い動作は不可能です」。また、歩行ロボットの場合も、数ミリ秒前の自分の足の状態を参照して次の動作を計算することになり、精度が著しく低下してしまう。
「しかも、この遅延は毎回一定の数値と決まっていません。どの程度の遅延になるかも予測できないので、事前の対策が難しいことが大きな問題です」(本間さん)
 モベンシス株式会社 副社長 兼 技術営業部長 本間 広光さん
モベンシス株式会社 副社長 兼 技術営業部長 本間 広光さん
こうしたパソコンとコントローラ間の通信には一般的なネットワーク技術を利用することもある。その場合、通信状況によって遅延は流動的になりがちだ。「産業界でフィジカルAIが人と共存するためには、『人が来たから止まれ』という判断が即座に、かつ確実に行われなければ大事故に繋がりかねません。この予測不能な遅延は、AIの判断を行うPCと、実際に機械を動かす制御用コントローラが分かれている構成では、対策が難しい課題でした」(宮田さん)
制御の常識を変える「ソフトモーション」技術
これらの課題を解決するのが、モベンシスの主力製品である「WMX」に代表される「ソフトモーションコントローラ」だ。従来、専用のハードウエア基板で行っていたモーション制御機能を、すべてソフトウエアとしてPC上に実装する技術である。
これにより、AI処理を行う1台のPCでロボット制御も可能になり、コントローラ間通信が不要になる。宮田さんは「PC内でのデータのやり取りになるため、遅延は従来の数百ミリ秒といった単位から、桁違いに小さいレベル(マイクロ秒オーダー)にまで収まります」と語る。
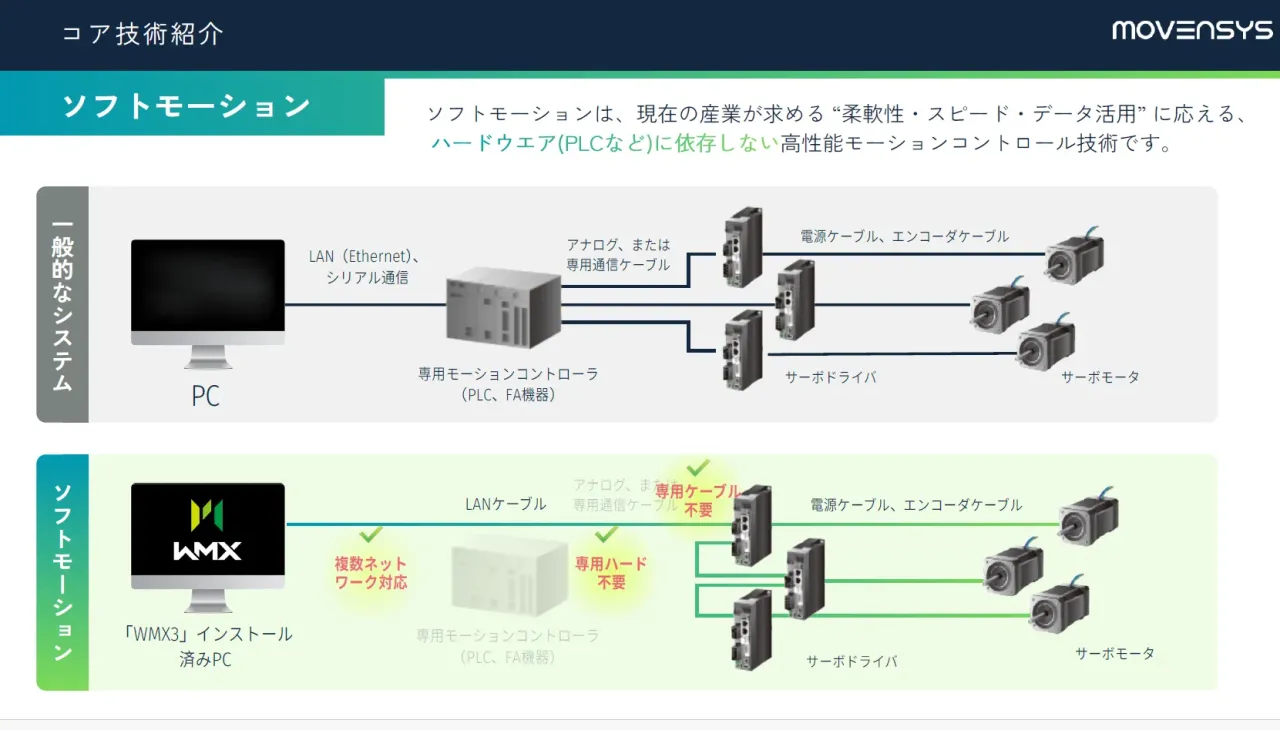 専用コントローラの代わりに、市販のWindowsパソコンにインストールしたソフトウエアのみで、様々な製造装置やロボットなど高速多軸同期モーション制御を実現する
専用コントローラの代わりに、市販のWindowsパソコンにインストールしたソフトウエアのみで、様々な製造装置やロボットなど高速多軸同期モーション制御を実現する
軽量化とコストダウンも実現する。ハードウエアを削減できることは、物理的なメリットも生む。「装置の小スペース化や軽量化が可能です。特にロボットが跳ねたり飛んだりするような用途では、この軽量化が大きなアドバンテージになります」。さらに、高価な専用ハードウエアのスロットを増やす必要がなくなるため、コストダウンにも大きく寄与する。
また、従来の制御(PLC)では特殊なプログラミング言語が使われ、スキルの習得が必要だったが、これも不要となる。WMXはC++、Python、C#といった一般的なプログラミング言語で制御ロジックを組むことができる。「若いエンジニアや学生なら、特殊な言語を学ぶより、使い慣れたプログラミング言語の方がよほど扱いやすい。企業にとっても、既存のIT人材を活用できる大きなメリットがあります」(本間さん)。モベンシスは、このソフトモーション技術のアーキテクチャで特許を取得しており、他社が容易に真似できない圧倒的な高速性と信頼性を実現している。
オープンな制御基盤が産業界を変える
モベンシスの歴史は、1998年のボストン、MIT(マサチューセッツ工科大学)から始まった。創業者の梁富好(ヤンブホ)代表取締役がMIT時代に考案した「ソフトだけで制御する」という理論を産業界に実装すべくスピンアウトしたのが同社の興りである。
モベンシスはソフトモーションコントローラの可能性を信じる。「最初の目標は、まずコントローラとして第一に選ばれることを目指していました。しかし今はその先を見ています。私たちは、産業界のプラットフォームになりたいのです」と本間さんは力強く語る。
例えるなら、モバイル業界における「Android OS」のような存在だ。「特定のメーカーしか使えないような囲い込み(エコシステム)ではなく、私たちのソフトというプラットフォームの上で、ユーザーが好きなモータやAI、ITツールを自由に組み合わせて最適な装置を作れる世界。それが私たちの考える『オープン』な未来です」(本間さん)
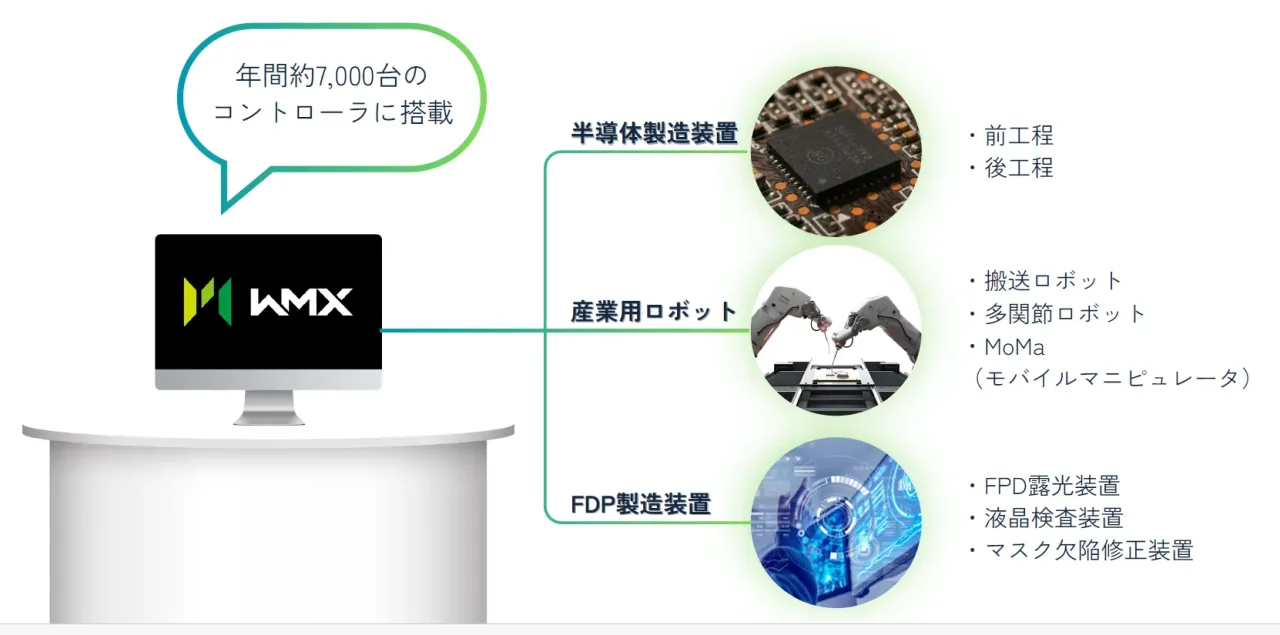 モベンシスのソフトモーションコントローラ「WMX」の採用領域
モベンシスのソフトモーションコントローラ「WMX」の採用領域
ソフトモーションの最大の利点は、PCのスペック向上とともにその性能も自動的にアップデートされていく点にある。CPUやGPUが進化すればするほど、モベンシスのソフトが提供できるバリューも高まっていくのである。「PCの性能アップが、そのままソフトモーションコントローラの向上に繋がります」(本間さん)。
モベンシスが描く未来のプラットフォームが、日本の、そして世界の産業をどのように加速させていくのか、その挑戦から目が離せない。



- share
-

-

-



