- 総合TOP
- 宇宙
- AI
- ロボット
- WEB3・メタバース
ロボットを導入するために、スロープを付け、作業台を改造し、専用の治具を新調する。こうした「ロボットのための環境整備」に伴う多大なコストと手間が、現場の自動化を阻んできた。本来、技術は現場のありのままの姿を助けるものであるはずだ。もし人間と全く同じサイズで、人間と同じ道具を使いこなす「動く知能」が現れたなら、その矛盾は解消に向かうはずだ。
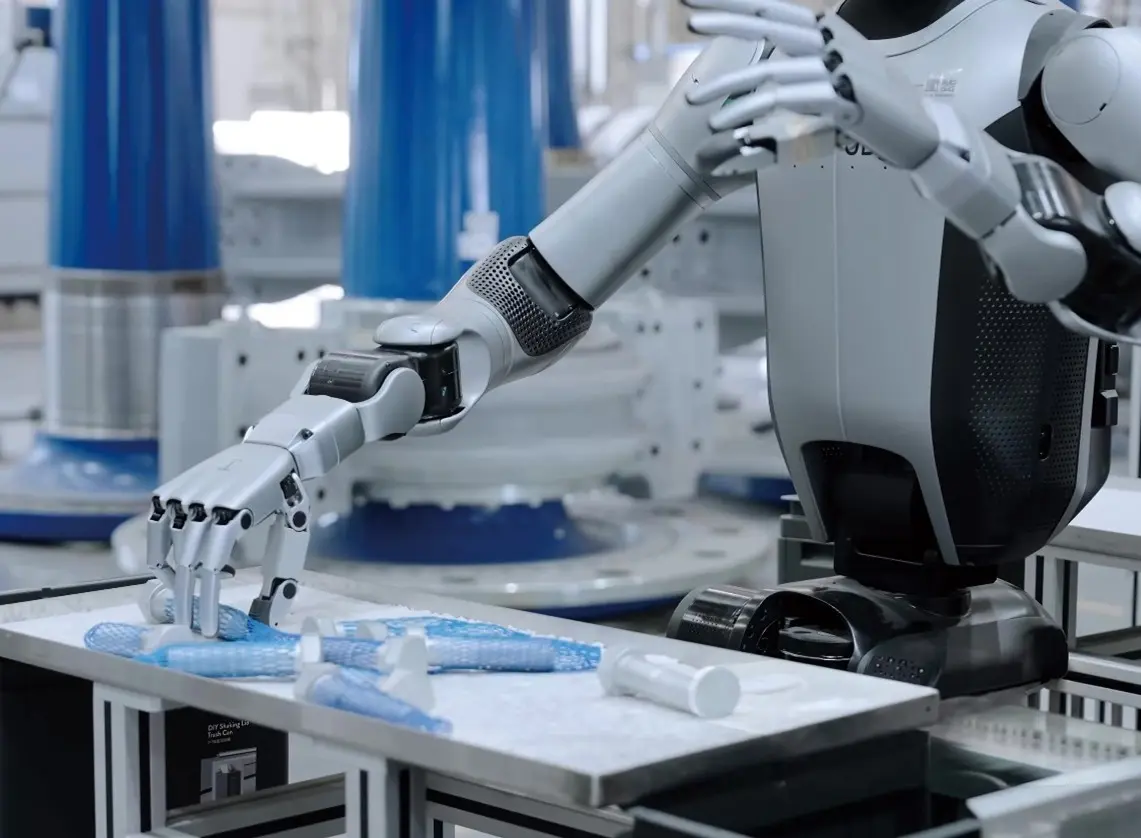
2026年4月、東京ビッグサイトで開催された「ヒューマノイドロボットエキスポ2026」。そこで株式会社GA Roboticsが披露したヒューマノイド「Walker Tienkung」の姿は、まさにその未来を具現化したものだった。身長172センチメートル、独立駆動する五指。人のために設計された空間をそのまま使いこなし、ボルトを摘み上げるその手先には、ヒューマノイドが実用化の「実装フェーズ」に突入した事実が刻まれていた。(文=RoboStep編集部)
独立駆動ハンドが示す巧緻性。ボルトをつまむ「指先」の進化
(引用元:PR TIMES)
GA Roboticsは、2026年4月15日から17日にかけて開催された展示会において、UBTECH社製のヒューマノイドロボット「Walker Tienkung」による精密なピッキングデモンストレーションを実施した。実演の内容は、製造現場において極めて一般的な「ボルト」のピックアップである。ボルトのような小径部品は把持の許容誤差が小さく、接触面積も限定されるため、従来のロボットハンドにとっては難易度の高い対象物であった。
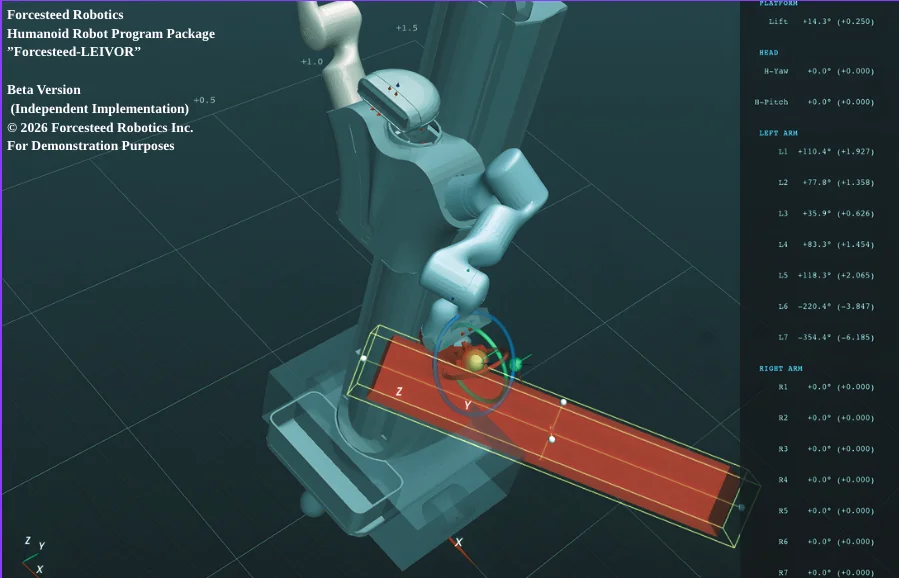
今回のデモにおいて特筆すべきは、視覚認識による自律補正に頼り切るのではなく、精密に教示された軌道と指制御の再現性によって、安定した把持動作を実現した点だ。具体的には、ダイレクトティーチング(直接教示)によって生成された動作軌道に基づき、ボルトへのアプローチからピンチ把持、安定保持、そして持ち上げまでの一連のシーケンスを、人間の指先のような滑らかさで再現した。
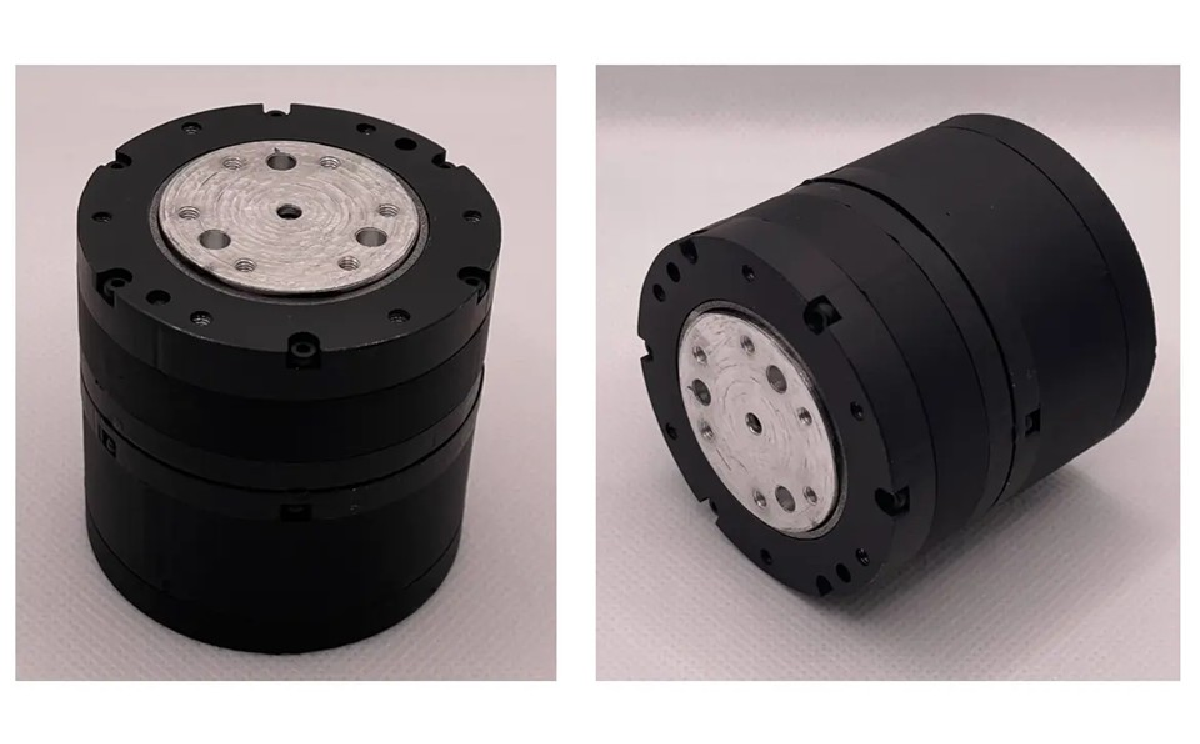
この巧緻性を支えているのが、各指を独立して駆動・制御できる多自由度ハンドの技術だ。指単位での独立アクチュエーションにより、ピンチ動作時の接触点を精密にコントロールし、指ごとの力配分を最適化できる。また、上肢は双腕合計で最大14キログラムの可搬能力を備えており、今回のデモのような小物部品の扱いにとどまらず 、軽作業に限定されない多くの作業をカバーできる設計思想が貫かれている。

(引用元:PR TIMES)
道具を変えず環境に歩み寄る。自動化の“矛盾”を解くヒューマノイド
Walker Tienkungが示した身長172センチメートルという「人間スケール」は、産業現場におけるロボット実装のあり方を根本から変える可能性を秘めている。
これまで特定の工程を自動化するためには、その作業に特化した専用機を導入するか、あるいはロボットの動作範囲に合わせて生産ライン全体を設計し直す必要があった。しかし、人間と同等スケールのヒューマノイドであれば、既存の作業台や人間用の治具をそのまま流用できる。これは設備改修という膨大な初期投資を抑え、既存の動線を維持したまま段階的に自動化を導入できることを意味する。ロボットに合わせて環境を変えるのではなく、ロボットが既存の環境に歩み寄る。この「環境適合性」こそが、これまで自動化を諦めていた中小規模の現場におけるDXのハードルを劇的に下げる鍵となるだろう。
また、物体認識と動作計画、そして精密な力制御が統合されたフィジカルAIの進化は、ヒューマノイドを単なる「観賞用の高度な機械」から、実利を生む「現場の道具」へと押し上げた。製造業や物流分野において、人の指先のような繊細な動作が求められる工程は依然として人手に頼らざるを得ない領域であったが、今回の実演はその領域が確実に狭まりつつあることを示している。
2026年、ヒューマノイドは人間と肩を並べて働く「即戦力」として、現実世界に本格的に進出し始めた。GA Roboticsが提示したこの実装モデルは、労働力不足という深刻な社会課題に対し、既存のインフラを最大限に活用しながら介入する有力な解決策となるだろう。人間と同サイズの知能が現場に立つ風景は、日本のものづくりの景色をより柔軟で強固なものへと書き換えていくはずだ。

- share
-

-

-



