- 総合TOP
- 宇宙
- AI
- ロボット
- WEB3・メタバース
フィジカルAIが次なる産業の主戦場となる中、開発者たちが直面しているのは、極めて物理的な壁だ。どれほど優れた学習モデルを構築しても、それを実行するロボットの関節に「遅れ」や「誤差」があれば、知能はその真価を発揮できない。ソフトウェアが急速に進化する一方で、ハードウェアがその歩みを遅らせるボトルネックとなっている状況は、2026年のロボティクスにおける最大の課題の一つといえる。
この課題に対し、ロボットの「筋肉」から定義し直そうとする挑戦が名古屋で始まっている。AGIRobots株式会社が2026年3月31日に発表した、自社製QDD(準ダイレクトドライブ)アクチュエータの試作機開発である。海外製の基幹部品を組み合わせて機体を作るアセンブリ の手法から脱却し、減速機・モータ・制御という精密機械の核心部から垂直統合を志向する。この中核技術の内製化こそが、日本のロボット製造が再び世界で優位性を確保するための分岐点となるかもしれない。(文=RoboStep編集部)
減速機から垂直統合。海外依存を排すQDDの内製化
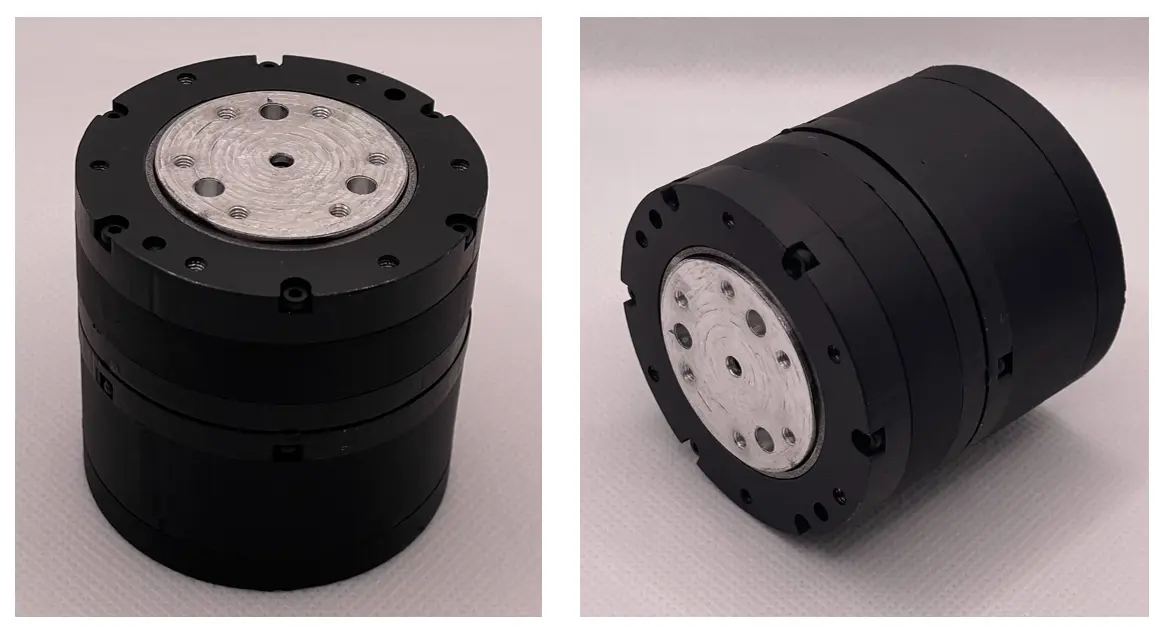
AGIRobotsが開発した試作機は、ロボットの俊敏性と繊細な制御を両立させるQDD方式のアクチュエータだ。比較的低い減速比の減速機と高出力モータを組み合わせることで、高出力を維持したまま応答性、制御性を同時に確立する。近年の4脚ロボットやヒューマノイド開発において、この駆動方式は重要な技術の一つとなった。
 (引用元:PR TIMES)
(引用元:PR TIMES)
特筆すべきは同社が、減速機から自社で設計・製作している点にある。アクチュエータの中核を成す減速機、BLDCモータ (ブラシレスDCモータ)、そして制御系。これらを別々のメーカーから調達して組み合わせるのではなく、一つのユニットとして垂直統合的に開発する体制を整えた。
試作機は外形寸法57mmというコンパクトな設計ながら、アームロボットへの搭載を想定した約30Nm級の出力を目標としている。さらに、モータ側と出力側の双方にエンコーダを配置する「デュアルエンコーダ構成」を採用。これにより、ロボットの初期位置合わせや複雑な動作からの復帰における運用性が向上し、実用フェーズでの信頼性が確保されている。同社はすでにこの試作機による駆動確認を完了しており、構想を実機へと落とし込む段階を終え、実証と改良のプロセスへと移行している。
AIにあわせた「専用の肉体」で、フィジカルAIの足かせを解く
AGIRobotsが立ち上げたアクチュエータの内製化は、単なるコスト削減や調達リスクの回避という次元を超えた意義を持つ。それは、ロボットの性能が「ソフトウェア」ではなく「ハードウェア」によって定義される時代への回帰、あるいは双方の高度な融合を意味している。
ロボット開発の主軸は生成AIを用いた行動学習へと移りつつあるが、汎用的な既製品アクチュエータに依存する手法には限界がある。市販の部品は多様な用途を想定して性能が平均化されており、開発者は「既存のカタログスペック」という制約に合わせてAIの挙動を調整せざるを得ないからだ。
AIが「もっと速く、もっと繊細に動きたい」と要求しても、ハードウェアがそれに対応できなければ、現場での成果に結びつかない。自社でアクチュエータを設計できるということは、AIの特性に合わせた「専用の肉体」を構築できるということ。その肉体が、他社には真似できない独自の運動性能を生み出す源泉となりうる。
この垂直統合モデルは加えて、日本の製造業が抱えるサプライチェーンの脆弱性に対する有力な回答でもある。地政学的な変動によって特定国の部品供給が滞るリスクが顕在化する中、減速機というブラックボックス化しやすい中核部品を国内で自給できる体制は、事業のレジリエンスを支える強固な土台となるだろう。
AGIRobotsは今後、耐久性やエネルギー効率の向上を図りつつ、パートナー企業との協業による量産化を見据えている。ハードウェアをブラックボックスのまま外注するのではなく、その中身を掌握し、自らの手でアップデートし続ける。この泥臭くも王道的なアプローチこそが、フィジカルAI時代の日本企業が世界と対等に渡り合うための不可欠な条件といえるかもしれない。「筋肉」から変革を起こす。同社の試みは、日本のものづくりに新たな活力を与える可能性を秘めている。


- share
-

-

-



