- 総合TOP
- 宇宙
- AI
- ロボット
- WEB3・メタバース
人間に近い身体を持つヒューマノイドへの期待が高まる一方、工場や倉庫で実際に働く姿を目にすることはまだ少ない。その背景には、最新のAI技術と、長年現場を支えてきた従来のロボット制御技術との間に、深い溝が存在していたという実情がある。
この分断された二つのアプローチを結びつける、画期的なソフトウェアが登場した。これまでの知見を捨て去るのではなく、最新技術の土台として融合させる。この現実的な選択が、人型ロボットの社会実装を一気に加速させていく。(文=RoboStep編集部)
AIとティーチングを結ぶ汎用コントローラ
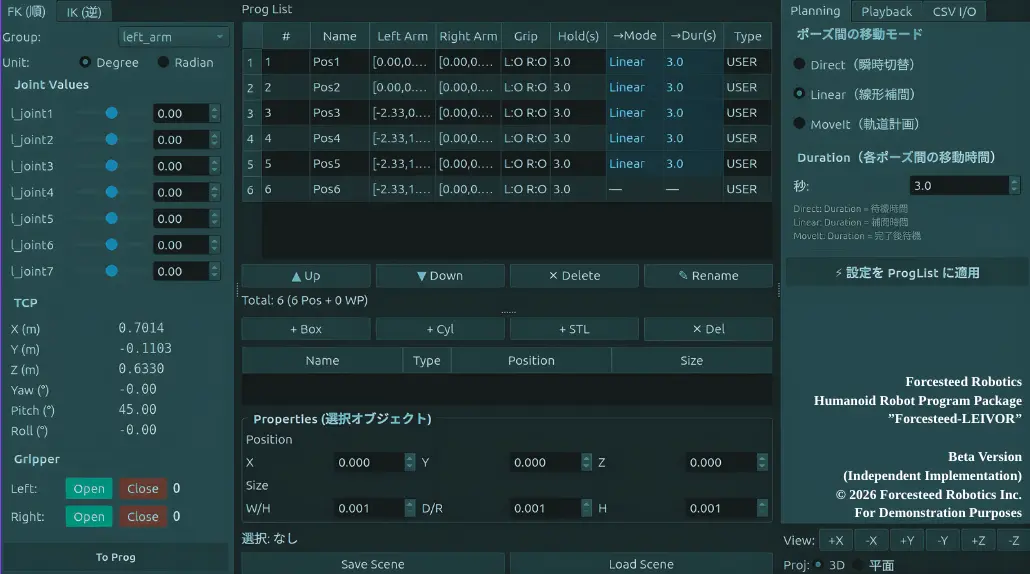
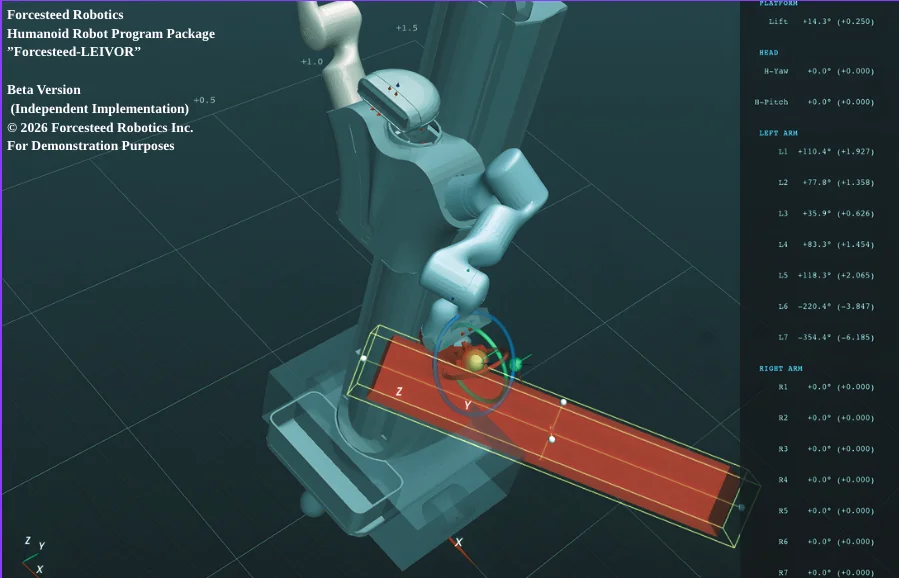
2026年4月3日、フィジカルAI分野の研究開発を行う株式会社Forcesteed Roboticsは、汎用ヒューマノイドコントローラ「Forcesteed-LEIVOR」を開発したと発表した。
 (引用元:PR TIMES)
(引用元:PR TIMES)
これまで製造業などの現場では、専門企業であるロボットSIerが、人間が手作業で動作を教え込む「ティーチング」という手法を用いてロボットを導入してきた。しかし、近年のヒューマノイドは、AIを用いた「模倣学習」や状況に応じた「推論」によって自律的に動くアプローチが主流だ。この開発思想の根本的な違いが壁となり、既存のロボットSIerが持つ豊富なノウハウをヒューマノイド分野へそのまま適用することが難しかった。
 (引用元:PR TIMES)
(引用元:PR TIMES)
今回開発されたソフトウェアは、このギャップを埋めるハイブリッドなフレームワークである。従来のティーチングと、AIによる模倣学習などを同一の開発フローの中で一体的に扱うことができる。さらに、ugoやRealMan、Unitreeといった複数の異なるロボットを共通の開発基盤として制御できる点も大きな特徴だ。
今後はVLAモデルへの対応を拡充し、画像認識技術や既存のパッケージとの統合を進め、ヒューマノイドを現場に適応する汎用システムへと引き上げていく方針を示している。
過去の資産を活かす。社会実装の現実解
新しいテクノロジーが社会に定着する過程において、過去の技術や体制をすべてゼロから作り直すアプローチは、現場の反発や導入の遅れを招きやすい。最先端のヒューマノイドを普及させる上で、長年現場を支えてきたロボットSIerを置き去りにせず、彼らの技術をAIと接続する枠組みを構築したことは、極めて現実的かつ効果的な戦略と言える。
実際の労働現場は常に状況が変化し、AIの自律学習だけでは対応しきれない複雑な環境も多い。そうした業務においては、人間の手で緻密に調整を行うティーチングの技術が依然として高い効力を発揮する。AIの学習能力と、熟練のエンジニアによるルールベースの制御を柔軟に組み合わせることで、初めて現場の実用に耐えうるシステムが完成するのだ。
また、既存のロボットSIerが持つ人材や技術をそのまま活用できることは、人手不足の業界において大きな利点となる。新たにAI専門のエンジニアを大量に採用せずとも、これまでの技術を持つ人材がヒューマノイドの導入を主導できるからだ。汎用的なコントローラとして複数の機体に対応するオープンな設計も、特定のハードウェアに縛られない自由なシステム構築を後押しする。
最新のAI技術と、現場で培われてきた実直なエンジニアリング技術。互いの弱点を補い合うように統合されることで、イノベーションは単なる実験室の成果から実社会のインフラへと昇華する。過去の資産を最大限に活かしながら新たなテクノロジーを受容するこの姿勢は、日本の産業基盤をより強靭なものへと育て上げていくはずだ。


- share
-

-

-



