- 総合TOP
- 宇宙
- AI
- ロボット
- WEB3・メタバース
物流倉庫の床に貼られた無数の磁気テープ、あるいは数センチの狂いも許されない高精度なデジタルマップ。これまでロボットが「自律的」に動くためには、人間が用意した膨大な「補助線」が必要だった。環境が少しでも変わればロボットは立ち往生し、その都度マップの更新やインフラの再整備という重労働が現場を疲弊させてきた。ロボットは、自らの「眼」だけで自由に歩くことはできないのか。
2026年3月、この問いに一つの答えが示された。株式会社Forcesteed Roboticsが開発したモビリティAIコアエンジン「Forcesteed-ARIA(フォースティード アリア)」は、地図に依存しない「マップレスナビゲーション」を実現。カメラ映像からその場で移動経路を導き出し、ロボットに“その場で判断する力”を与える。外部インフラに頼らないこの技術は、ロボット活用の前提そのものを変えようとしている。(文=RoboStep編集部)
マップレスが拓く機動性。VLA型AIが見通す「数秒先の未来」

(引用元:PR TIMES)
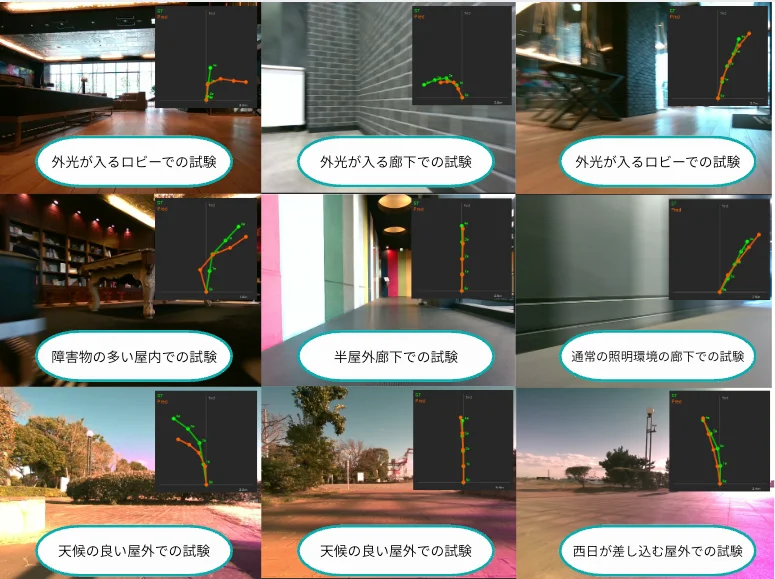
Forcesteed Roboticsが開発し、2026年3月に実環境での概念実証(PoC)を開始した「Forcesteed-ARIA」は、ロボットの移動行動をリアルタイムに生成するAIコアエンジンだ。その最大の特徴は、SLAM技術や高精度地図 といった従来の自律移動に不可欠だった環境情報に依存せず、搭載されたカメラ画像のみで経路を導き出す点にある。
技術の根幹を支えるのは、自動運転分野で研究が進むVision-Language-Action(VLA)型AIをロボット用途に軽量化した独自の基盤モデルだ。カメラから得た情報をもとに、空間構造や障害物の位置を理解し、ロボット座標系で即座に移動経路へと変換する。
 (引用元:PR TIMES)
(引用元:PR TIMES)
さらに、すべての処理がローカルの計算環境で完結することも実務上の大きな利点といえる。ミリ秒単位の判断が求められる現場において、クラウド接続の遅延に左右されることなく、リアルタイムに行動を生成し続けることが可能となったのだ。
これまでロボット導入の障壁となっていた磁気マーカーの敷設や、数カ月を要する地図作成といった「事前の環境整備」を不要にするこのシステムは、ロボット活用の前提条件を根本から書き換える実力を持っていると言えるだろう。
「環境への依存」からの脱却。フィジカルAIが促すロボット導入
この技術が示すのは、ロボットの進化の方向そのものだ。
従来のロボットナビゲーションは、あらかじめ作られた地図と現在地を照らし合わせる受動的なものだった。しかし、視覚情報から直接行動をプランニングするマップレスな手法は、その場の状況を読み取りながら行動を組み立てる“即応型”へと重心を移している。これはロボットが単なる機械を超え、より生物に近い「身体的知能(フィジカルAI)」を獲得するための重要なステップといえるだろう。
この進化は、日本社会が直面する労働力不足という難題への有力な処方箋にもなるはずだ。外部インフラへの依存を断ち切ることは、ロボット導入のリードタイムを劇的に短縮し、中小規模の製造現場やレイアウトが頻繁に変わる物流センター、さらには災害現場といった「非定型な空間」への展開を容易にする。低コストで即座にロボットを配備できる環境が整えば、現場の生産性は大きくアップデートされることになるだろう。
これからのロボットは、ハードウェア性能や地図精度といった従来の指標だけでは評価しきれない段階に入りつつある。焦点は、「その場でどう判断できるか」という知能の質へと移り始めた。Forcesteed Roboticsが提示したマップレスというアプローチは、ロボットを特定環境に最適化された存在から、より汎用的な存在へと転換させる可能性を持つ。知能が地図の役割を補完し、ロボットは環境制約から解放されつつある。こうした変化は、私たちの働く現場のあり方にも静かな変化をもたらしていくだろう。


- share
-

-

-



