- 総合TOP
- 宇宙
- AI
- ロボット
- WEB3・メタバース
2024.11.26
3大ロボット分野「サービス」「産業用」「協働」の違いは何か?
ロボット技術の進歩により、様々な種類のロボットが私たちの生活や産業界で活躍するようになりました。しかし、サービスロボット、産業用ロボット、協働ロボットという言葉を聞いて、その違いを明確に説明できる人は少ないでしょう。本記事では、これら3種類のロボットの特徴や違いを、初心者の方にもわかりやすく解説します。
ロボットの分類:サービス、産業用、そして協働ロボット
ロボットは大きく分けて、サービスロボットと産業用ロボットの2つに分類されます。
産業用ロボット
製造業などにおける生産の現場で使用されるロボットを指します。工場の専用区画といった、人と隔絶した場所で動く事がメインです。高速に稼働し甚大な力を発揮するため、人がロボットの可動範囲内に近づくと、深刻な事故につながりかねないからです。一般的な産業用ロボットを安全に稼働させるためには、安全柵を設置し、人の作業エリアとの隔離が必須であると「労働安全衛生規則(第150条の4)」で定められています。
 (引用:川崎重工業)
(引用:川崎重工業)
サービスロボット
「産業用ロボット以外」と仮に定義づけ、人と密接に働き、人を助ける役割を担っています。主に一般生活や公共の場で人間を支援するロボットを指し、家庭やオフィス、公共施設など幅広い場所で活用されます。
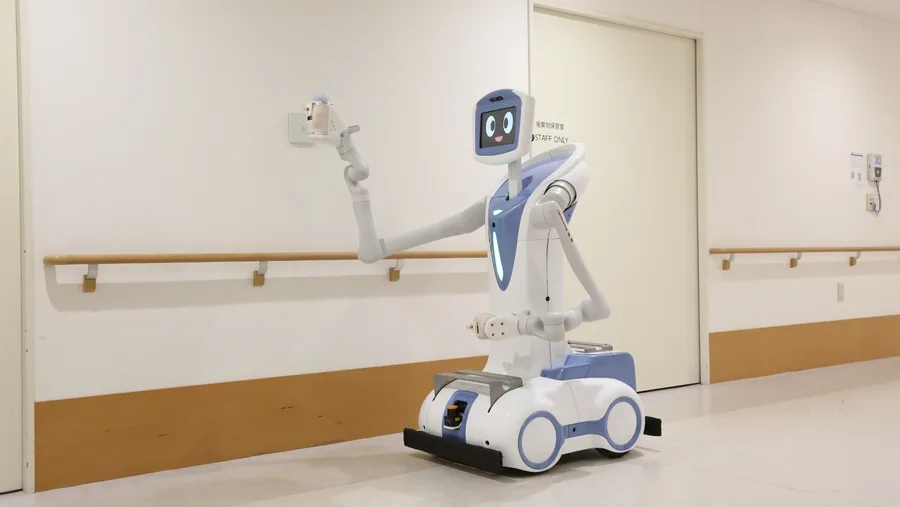 (引用:川崎重工業)自律走行型サービスロボット「Nyokkey(ニョッキー)」。配膳からビルの清掃業務のサポートなど多くのシーンに適応
(引用:川崎重工業)自律走行型サービスロボット「Nyokkey(ニョッキー)」。配膳からビルの清掃業務のサポートなど多くのシーンに適応
ここに加えられるのが協働ロボット。「産業用ロボットでありながら、人に近い場所で協力して働く」ことが可能で、人間との協働作業を前提に設計された新しいタイプのロボットです。端的に言えば、産業用とサービスロボットの中間に位置するといえます。
生産現場で稼働するので、産業用ロボットの分類にはなりますが、協働ロボットの分野はますます増えてきているので、この記事では3つめの分類として考えます。
使用環境と適用分野
サービスロボット、産業用ロボット、協働ロボットは、それぞれ異なる環境で活用されています。
サービスロボットは、主に一般の人々が生活する環境で使用されます。家庭での掃除ロボットや、商業施設での案内ロボット、医療現場での介護支援ロボットなどが代表例です。これらのロボットは、人間との直接的なインタラクションを前提に設計されています。
一方、産業用ロボットは工場や製造現場で活躍します。自動車産業での溶接や組立作業、電子部品製造での精密作業などが主要な用途です。これらのロボットは高出力・高速で動作し、精密な作業を行うことができます。しかし、そのパワフルな動きと高速性のため、人間と接触した場合は非常に危険です。そのため、通常は安全柵で囲まれた環境で使用されます。
協働ロボットは、産業用ロボットの一種でありながら、人間との協働を前提としているため、工場内で人間と同じ空間で作業することができます。中小企業や多品種・少量生産の現場など、従来の産業用ロボットの導入が難しかった環境でも活用されています。
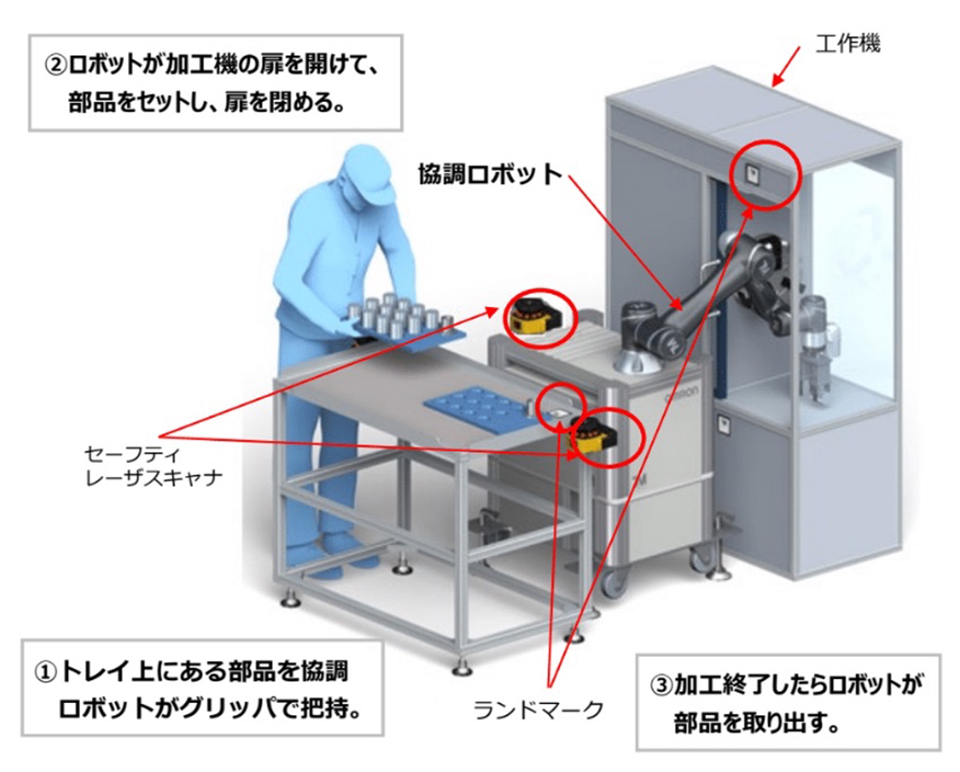 (引用:オムロン) 協働ロボットの例。産業分野で稼働しつつ、安全柵が不要なので人と「協調」して「働く」ことが可能
(引用:オムロン) 協働ロボットの例。産業分野で稼働しつつ、安全柵が不要なので人と「協調」して「働く」ことが可能
技術的特性の比較
サービスロボット、産業用ロボット、協働ロボットは、その用途や使用環境の違いから、技術的特性も大きく異なります。ここでは、安全性、操作性、可搬重量と速度、プログラミングの柔軟性という観点から比較します。
安全性と人との接触
サービスロボットは人間との直接的な接触を前提としているため、本質的に安全性が高く設計されています。
一方、従来の産業用ロボットは高速・高出力で動作するため、人間との接触を避けるために安全柵の設置が法律で義務付けられています。また、協働ロボットは産業用ロボットでありながら人との接触を想定した安全機能を備えており、安全柵なしで人間と同じ空間で作業できる点が特徴的です。
操作性と専門知識の必要性
サービスロボットは一般ユーザーでも簡単に操作できるよう設計されています。専門的な知識を持っていないユーザーを前提としていることから、多くの場合、スマートフォンアプリや簡単なボタン操作で制御できるようになっています。
産業用ロボットを扱うには、専門的な知識と訓練が必要です。特にプログラミングや動作の設定には高度なスキルが求められ、例えばロボットに特定の動きを覚えさせる作業などでは高度な専門知識が不可欠です。一方、協働ロボットは直感的なインターフェースを持ち、比較的容易に操作できます。多くの協働ロボットは、手で直接ロボットアームを動かしてプログラミングする「ダイレクトティーチング」と呼ばれる機能を備えており、専門知識を持たない作業者でも操作しやすくなっています。
可搬重量と動作速度
産業用ロボットは高速で重量物を扱えますが、サービスロボットと協働ロボットは比較的軽量で動作速度も控えめです。これは、安全性と使用環境の違いによるものです。
産業用ロボットは数百キログラムの部品を秒速数メートルで移動させることができますが、協働ロボットの多くは数キログラムから数十キログラム程度の可搬重量で、人間の動きに近い速度で動作します。
サービスロボットはさらに軽量で低速であり、家庭や公共空間で安全に使用できることを重視しています。
プログラミングの柔軟性
通常、サービスロボットが限定された機能を持つのに対して、産業用ロボットは複雑なプログラミングが可能で、それにより多様な作業に対応できる高い柔軟性を持っています。協働ロボットは、産業用ロボットほど複雑ではありませんが、比較的容易にプログラミングの変更ができる柔軟性を持っています。
多くの協働ロボットは、グラフィカルユーザーインターフェース(GUI)を用いた直感的なプログラミング環境を提供しており、専門家でなくても作業内容の変更や新しいタスクの追加が可能です。
3つのロボットカテゴリーの特徴を活かした新たな展開も
サービスロボット、産業用ロボット、協働ロボットは、それぞれ異なる特徴と役割を持っています。一方で、技術の進歩とともにその境界線は徐々に曖昧になっていくかもしれません。
今後は、これら3つのカテゴリーの特徴を組み合わせた新たなロボットが登場する可能性もあります。例えば、産業用ロボットの高速で精密な動きと、サービスロボットが持つ人間とのコミュニケーション能力を兼ね備えたロボットが、複雑な組立作業を人間と協力しながら行うかもしれません。また、協働ロボットの安全性と使いやすさを維持しつつ、産業用ロボットの高い可搬重量を実現したロボットが、建設現場で人間の作業者と共に重量物の運搬や設置を行う可能性も考えられます。
このような技術の融合により、ロボットの活躍の場は工場だけでなく、病院、学校、公共施設など、より身近な場所に広がっていくでしょう。高度な医療処置を行いながら患者とコミュニケーションを取れる医療ロボットや、危険な災害現場で高い機動性と判断力を発揮する救助ロボットなども、実用化される可能性は十分にあります。
これらのロボットは、人間の能力を補完し、より安全で効率的な社会の実現に貢献すると期待されています。



- share
-

-

-



