- 総合TOP
- 宇宙
- AI
- ロボット
- WEB3・メタバース
人間にとって「走る」という動作はごく自然なものだが、二足歩行のロボットにとっては複雑で難易度の高いバランス制御が必要ととなる。ゆえに「走る」動作を研究し極めることは、技術を高次元で昇華させることとなる。ひいては研究課程で、ロボットの可能性を広げ、労働や作業を代替するために重要な要素となり得る。
そこで、トップアスリートの研ぎ澄まされた走行データをAIに学習させるという画期的なプロジェクトが動き出した。スポーツ科学とロボティクスが交差する新たなアプローチは、ヒューマノイドの社会実装を阻む課題をどのように突破していくのだろうか。(文=RoboStep編集部)
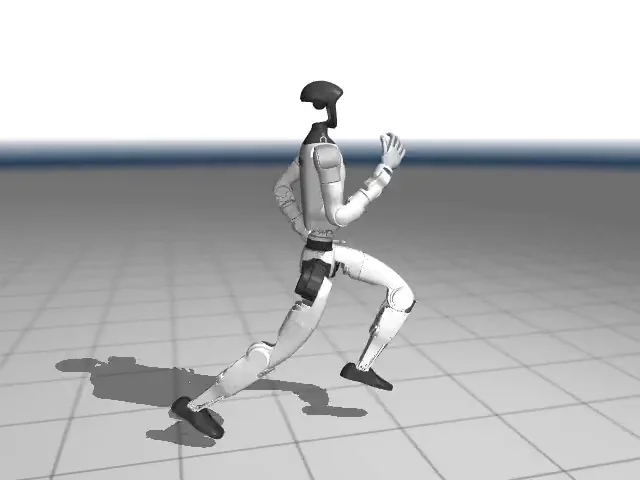
陸上選手の動作を再現。走るヒューマノイド
2026年4月2日、AI・ロボティクスの社会実装を手掛けるGMO AI&ロボティクス商事株式会社は、完全自律走行で人間の走りを再現するヒューマノイドロボットの実証実験プロジェクト「GMOロボッツ」を開始したと発表した。
本プロジェクトは、2026年のニューイヤー駅伝で大会新記録を出して優勝したGMOインターネットグループ陸上部との連携により推進される。
 (引用元:PR TIMES)
(引用元:PR TIMES)
選手の洗練された走行モーションデータを取得して解析し、強化学習などのAI技術を用いることで、トップアスリートのように走るヒューマノイドロボットの開発を目指すものだ。
同グループは、AIとロボットの進化による産業構造の変化を「インターネット革命の後半戦」と捉え、2026年を「ヒューマノイド元年」と位置づけている。
(引用元:PR TIMES)
AIの強化学習においては、データの量だけでなく「質」が重要となる。一流の駅伝選手は、無駄のない走行フォームを長時間にわたって安定して維持できるため、ロボットの参照データとして最適な条件を備えている。日本トップレベルのチームを有するからこそ実現可能な技術実証と言える。
さらに、この情報の流れは一方通行ではない。ロボットの開発過程で得られた力学的な知見を選手へとフィードバックし、フォームの改善やケガの防止に役立てる。ロボット工学とスポーツ科学が相互に価値を還元し合う、新しい開発モデルが構築されている。
基本動作の極致が拓く、実社会への応用
アスリートの動きを機械にトレースするこの試みは、単なる技術のデモンストレーションの枠には収まらない。
ロボットが「走る」という複雑な基本動作を極めることは、あらゆる労働や作業を代替するための重要な基盤技術となる。歩行とは異なり、走る動作は両足が地面から離れる瞬間が存在し、着地時に発生する大きな衝撃を吸収しながら次の動作へと繋げる高度な制御が求められる。このバランス制御技術が確立されれば、足場が不安定な場所での重い荷物の運搬、段差や急な階段の昇降、そして予期せぬ障害物の回避といった、より複雑で実用的な動作への応用が容易になるのだ。
現在、ヒューマノイドロボットの領域では米国や中国などが大規模な投資を行い、世界的な開発競争が激化している。日本のロボット産業がこの競争を生き抜くためには、機体というハードウェアの開発にとどまらず、ソフトウェアによる高度な自律動作の確立が急務である。
同社は、人間の動作データから動きを最適化する「モーション強化学習」と、周囲の環境を認識して経路を判断する「自律走行技術」を融合させ、実環境下で自律的に動作するシステムの構築を急ぐ。将来的な展開として、物流倉庫での荷物運搬や製造現場での部品搬送、さらには危険を伴う災害現場での救助活動支援などを想定しており、深刻な社会課題となっている労働力不足の解決に貢献していく方針だ。
人間の限界に挑み続けてきたアスリートの研ぎ澄まされた身体性が、最新のAIを通じて知能を持った機械へと受け継がれていく。人間とテクノロジーが互いに高め合うこの新たなアプローチは、ロボットが私たちの生活空間に自然に定着し、社会の不可欠なインフラとして機能するための確かな足がかりとなっていくはずだ。



- share
-

-

-



