共創で日本をステップさせるメディアプロジェクト
- 総合TOP
- 宇宙
- AI
- ロボット
- WEB3・メタバース





製品・サービス・技術を一言でいうと
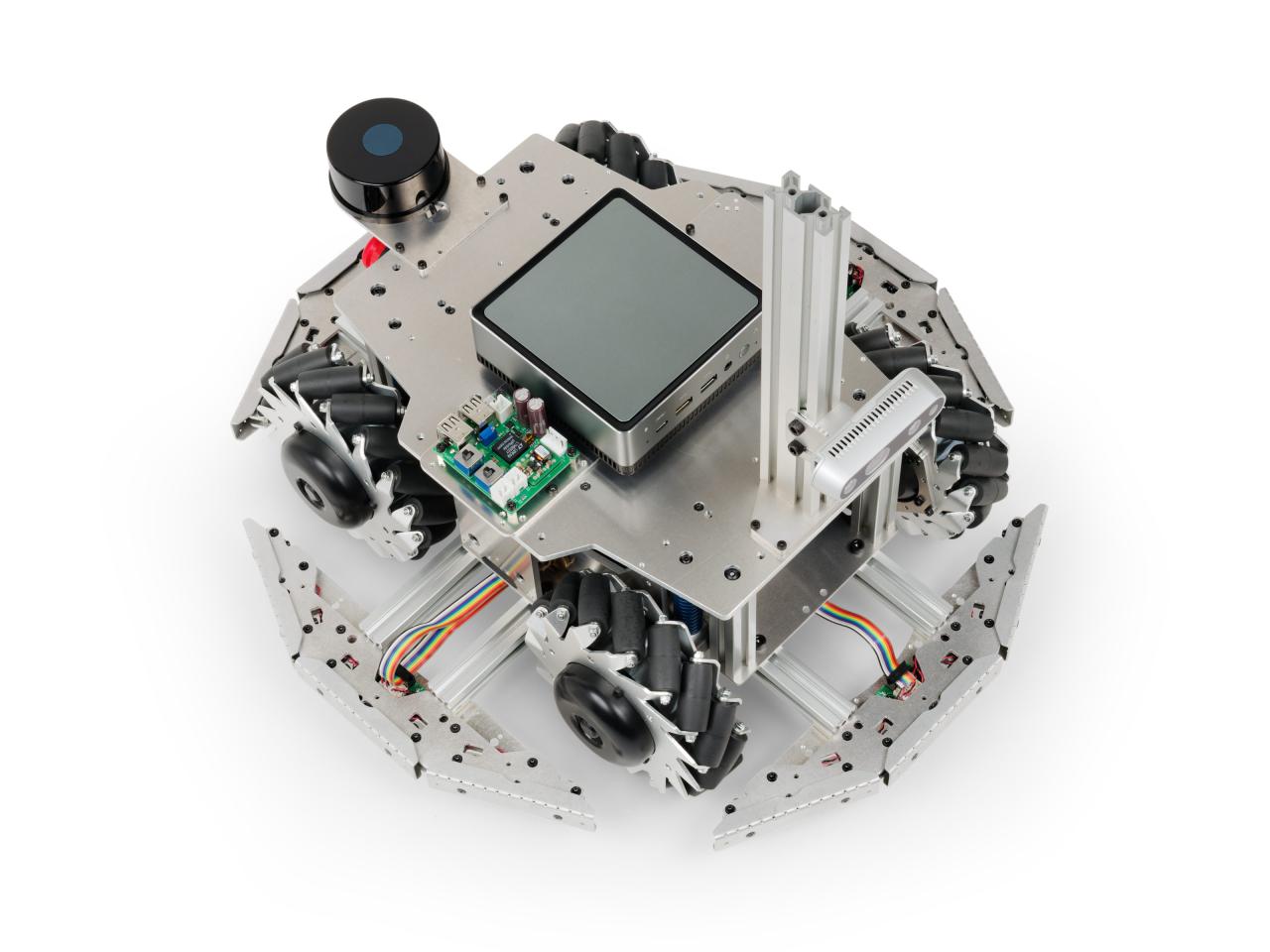
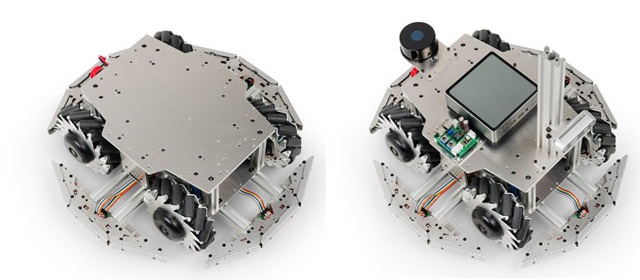
メカナムローバーは、前後・左右・回転を組み合わせた自由度の高い移動ができることが大きな特徴で、細かい位置制御が求められる搬送・自律移動などの研究開発プロジェクトに好適です。
こんなお困りごとに最適!
- 可能な限り動作音を小さくしたい
- 実用・実務も見据えた本格的な実証実験などにも対応したい
- PCやタブレットなど、様々なデバイスから制御したい
製品・サービス・技術の特長
●インホイールモーターを採用した静音構造
●可搬重量約40㎏を実現した四輪メカナムホイール構造
●有線/無線接続による制御が可能
メカナムローバーVer.3.0サービス紹介
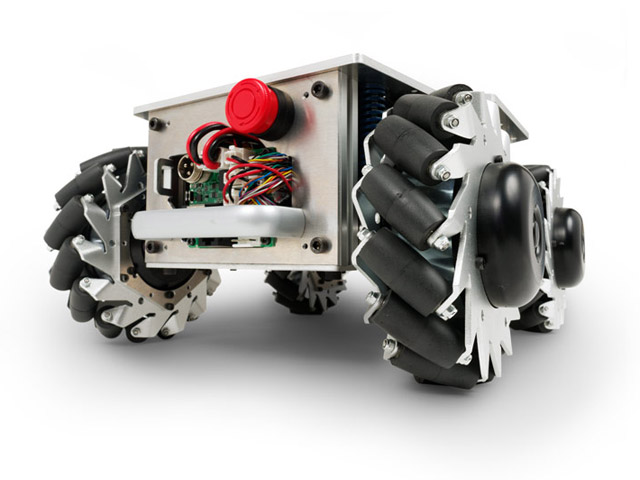

車輪の駆動にインホイールモーターを採用することで、動作音を大きく低減しています。
前後・左右・回転の動きを自由に組み合わせることができる四輪メカナムホイールを採用しており、外部からの位置制御に柔軟に対応できます。
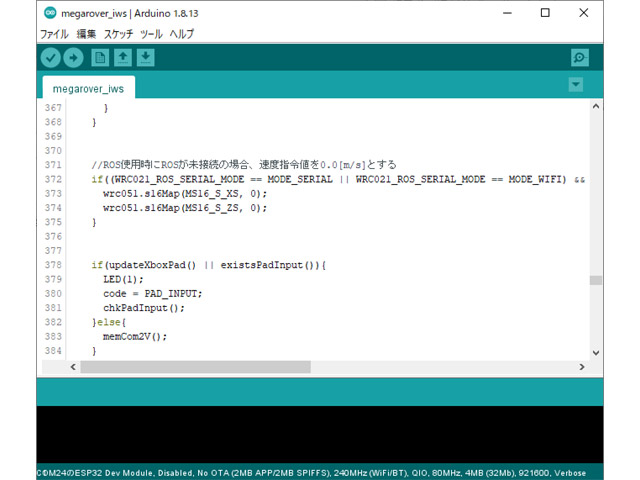
Arduino IDEを用いて制御プログラムを作成することができ、ユーザー自身の手でファームウェアのカスタマイズを実施することも可能です。ROS、 ROS 2による制御に対応しています。
前後・左右・回転の動きを自由に組み合わせることができる四輪メカナムホイールを採用しており、外部からの位置制御に柔軟に対応できます。
Arduino IDEを用いて制御プログラムを作成することができ、ユーザー自身の手でファームウェアのカスタマイズを実施することも可能です。ROS、 ROS 2による制御に対応しています。
メカナムローバーVer.3.0は、数多くのオプション品に対応しています。用途に合わせてセンサーや構成部品を追加することが可能で、多様な研究・開発分野にて、大型の研究開発用台車ロボットの能力を存分に活用することができます。
関連動画
ROS対応 四輪駆動台車ロボット メカナムローバーVer.3.0 製品紹介
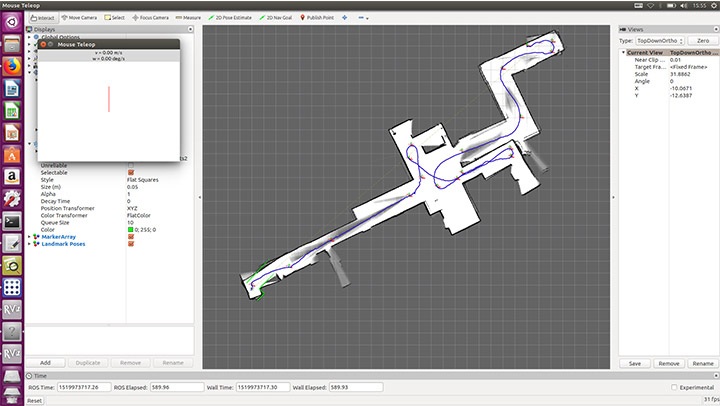
SLAM性能比較! LRFを2個に増やすと何が良くなる?
会社概要
| 社名 | ヴイストン株式会社 |
|---|---|
| 代表者名 | 大和信夫 |
| 設立年月日 | 2000年8月4日 |
| U R L | https://www.vstone.co.jp/ |
| 住所 | 大阪府大阪市西淀川区御幣島 2-15-28 |
| 電話番号 | 06-4808-8701 |
| 公式S N S |
|
- share
-

-

-

関連製品・サービス・技術





©2025 JapanStep