- 総合TOP
- 宇宙
- AI
- ロボット
- WEB3・メタバース
物流倉庫や工場で自動搬送システムの導入が急務となる中、大きな障壁となっているのが「現場の流動性」だ。荷物の置き場が日々変わる環境では、すべてを機械に任せる完全自動化はかえって運用を難しくし、導入を諦める企業も少なくない。
こうした中、100%の自動化にこだわるのではなく、人間とロボットが柔軟に作業を分担する新たなアプローチが登場した。あえて自動化の範囲を限定する「引き算」の選択は、現場の課題をどう突破していくのだろうか。(文=RoboStep編集部)
長距離は自動、始点と終点は人が担う
2026年3月31日、物流の完全自動化を目指すスタートアップ企業である株式会社ハクオウロボティクスは、自社が展開する小型自動フォークリフト「AutoFork」において、新機能となる「キャッチ&リリース機能」の提供を開始したと発表した。
 (引用元:PR TIMES)
(引用元:PR TIMES)
庫内搬送や工程間搬送に対応した「AutoFork」は、納入当日から稼働できる簡易なセットアップを強みとしている。しかし、実際の物流現場では、長距離の搬送ルート自体は固定されていても、荷物を取得する場所や下ろす場所がその日の状況によって流動的に変わることが多い。従来の自動搬送システムでは、あらかじめ始点と終点の正確な位置を決めておく必要があり、この日々の変化に対応できないことが導入の大きな障壁となっていた。
 (引用元:PR TIMES)
(引用元:PR TIMES)
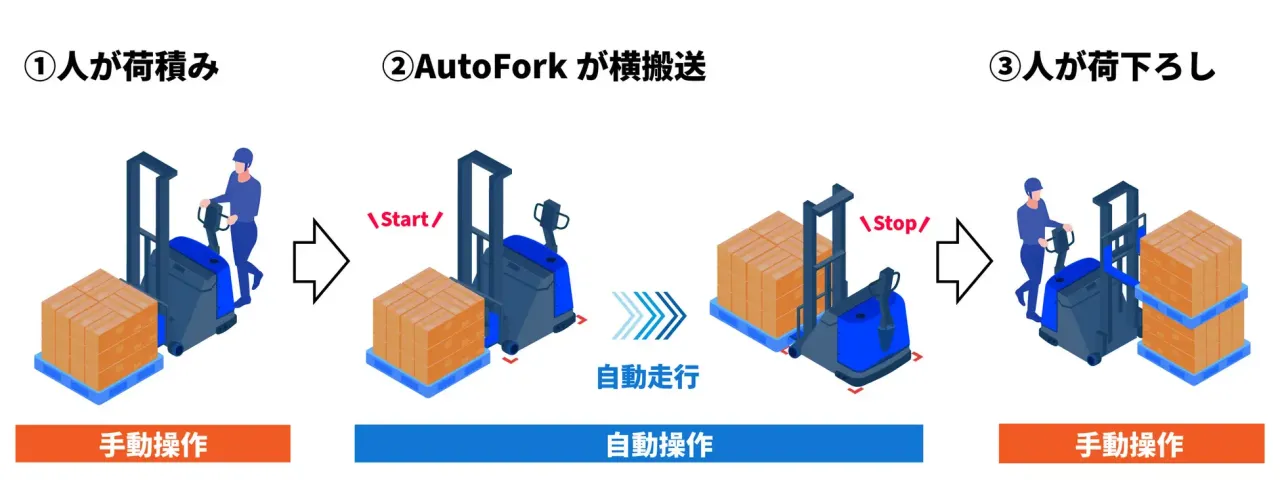
この課題を解決するために開発されたのが「キャッチ&リリース機能」だ。作業者が始点で「AutoFork」をマニュアル操作してパレットを持ち上げ、所定の位置へ移動してから自動搬送モードに切り替える。すると、「AutoFork」は荷下ろし場所の付近までルートを自動で走行。目的地に到着した後、終点にいる別の作業員が再びマニュアル操作に切り替えて、適切な場所へパレットを下ろす仕組みだ。荷下ろしを終えれば、再度自動モードで次の目的地へと向かわせることもできる。
この機能は、「AutoFork」の各モデルに標準機能として組み込まれる。現在β版として提供されており、量産機を用いた1カ月間のトライアルを通じて、実際の現場環境で効果を検証することが可能となっている。
完全自動化の罠を抜ける。現実的な協働
今回の新機能の提供は、ロボティクスの社会実装において「100%の自動化」にこだわる必要はないという事実を示唆している。
テクノロジーが進化する過程において、開発者や経営層はあらゆるプロセスを無人化しようと試みがちである。しかし、物理法則や人間の経済活動が複雑に絡み合う現実の現場では、すべての例外事象をシステムに組み込むことは非常に困難であり、膨大なコストと開発時間を要してしまう。
そこで効果を発揮するのが、「人間の柔軟性」と「機械の効率性」を明確に切り分けるというアプローチだ。状況に応じた微調整や例外への対応といった複雑な判断は人間が担い、単調で労力のかかる長距離の移動のみをロボットに任せる。この適材適所の分業体制を築くことで、企業は大掛かりな設備の改修や現場レイアウトの固定化を行うことなく、既存のオペレーションへスムーズにロボットを組み込むことが可能になるのだ。
人間を現場から排除するのではなく、機械を人間の頼もしい相棒として位置づける。あえて自動化の範囲を限定することで実用性を高めたこのシステムは、完全自動化という理想と、流動的な現場という現実の間に存在していた深い溝を見事に埋めている。
物流や製造の現場がかつてない労働力不足に直面する中、テクノロジーに現場を合わせるのではなく、現場の課題にテクノロジーが寄り添うアプローチが求められている。人間とロボットが柔軟にタスクをパスし合うこの新たな運用モデルは、停滞するサプライチェーンに確かな活力を与え、持続可能な産業構造を築き上げるための重要な鍵となっていくはずだ。



- share
-

-

-



