- 総合TOP
- 宇宙
- AI
- ロボット
- WEB3・メタバース
2025年4月に中国・北京で初めて本格的なヒューマノイド・マラソン大会が開催されるなど、ヒューマノイドをめぐる社会実装の機運は着実に高まりつつある。一方で、その実現には依然として克服すべき技術課題が少なくない。高度制御を支える半導体分野でロボット開発にも携わる日本テキサス・インスツルメンツ(以下、日本TI)は、ヒューマノイド開発の主要な技術的障壁を整理し、その現在地を明確に示した。2025年11月19日、パシフィコ横浜で開催された「EdgeTech+ 2025」の基調講演では、制御、電源、センシング、安全性といった基盤技術に関する論点が体系的に語られ、実用化に向けた重要な示唆が提示された。同社が描く技術展望と課題認識を手がかりに、ヒューマノイド社会実装のリアリティを探る。(文=RoboStep編集部)
ヒューマノイド需要が急拡大する理由
時は1961年。製造現場に投入され始めた産業用ロボットは、人間とは隔離された「ケージの中」で定型作業を繰り返す装置として稼働していた。その後、進化の第二段階として、人の隣で作業を補佐する「協働ロボット(コボット)」が登場し、さらに自立性が高まり、ガイドなしで倉庫内を自走する「自律走行搬送ロボット(AMR)」へと進化。ロボットは徐々に人間の活動領域へと浸透してきた。
労働人口の減少が進む現在、人と同じ形状を持つ「汎用機としてのヒューマノイド」への期待が急速に高まっている。その背景には、二足歩行という形態が既存の工場や倉庫、建設現場といったインフラ環境にそのまま適応できる点がある。階段やドア、通路、工具など、既存設備を活用できる労働力としてのポテンシャルも評価されている。
市場の見通しからも、その期待の大きさがうかがえる。「市場予測によれば、現在は世界で2万台程度に過ぎないヒューマノイド市場ですが、2030年には約90万台、2035年には600万台規模へ達すると見込まれています」と技術動向を長年追ってきた日本TI 営業・技術本部 インダストリアル マネージャー 初山 翔星 氏は語る。
 日本TI 営業・技術本部 インダストリアル マネージャー 初山 翔星 氏
日本TI 営業・技術本部 インダストリアル マネージャー 初山 翔星 氏
「人がいれば、そこには必ずロボットもいる」という未来は、もはや空想ではなく、具体的なビジネスのタイムラインに乗っているのである。一方で、そう簡単に実用化が進まないのはなぜか。
五つの要素が握る実用化の核心
初山氏は、ヒューマノイド開発の課題を人体の構造に対応づけ、『脳』『筋肉』『神経』『感覚』『心臓』の五つの要素技術として体系化した。これらは相互に絡み合い、一つでも欠ければヒューマノイドの実用化は実現しない。
脳(Computing):クラウド依存では転倒回避が間に合わない
自律的に動くヒューマノイドにおいて、知能をつかさどる「脳」の役割は重要だ。しかし、複雑な処理をすべてクラウドに任せていては、通信遅延(レイテンシ)が致命傷となる。「転びそうになった時、クラウド側の応答を待つようでは間に合わない」からだ。
ロボット本体(エッジ)で瞬時に判断を下すリアルタイム性が求められるが、さらに重要なのが「安全性」との両立である。高度なAI処理を行っている最中でも、システムのエラーを監視し、危険があれば即座に安全停止させる独立した監視機能が、同じチップ内に共存している必要がある。高度な知能処理と、安全性を担保する堅牢な監視機構をエッジ側で完結させることが最初の壁となる。
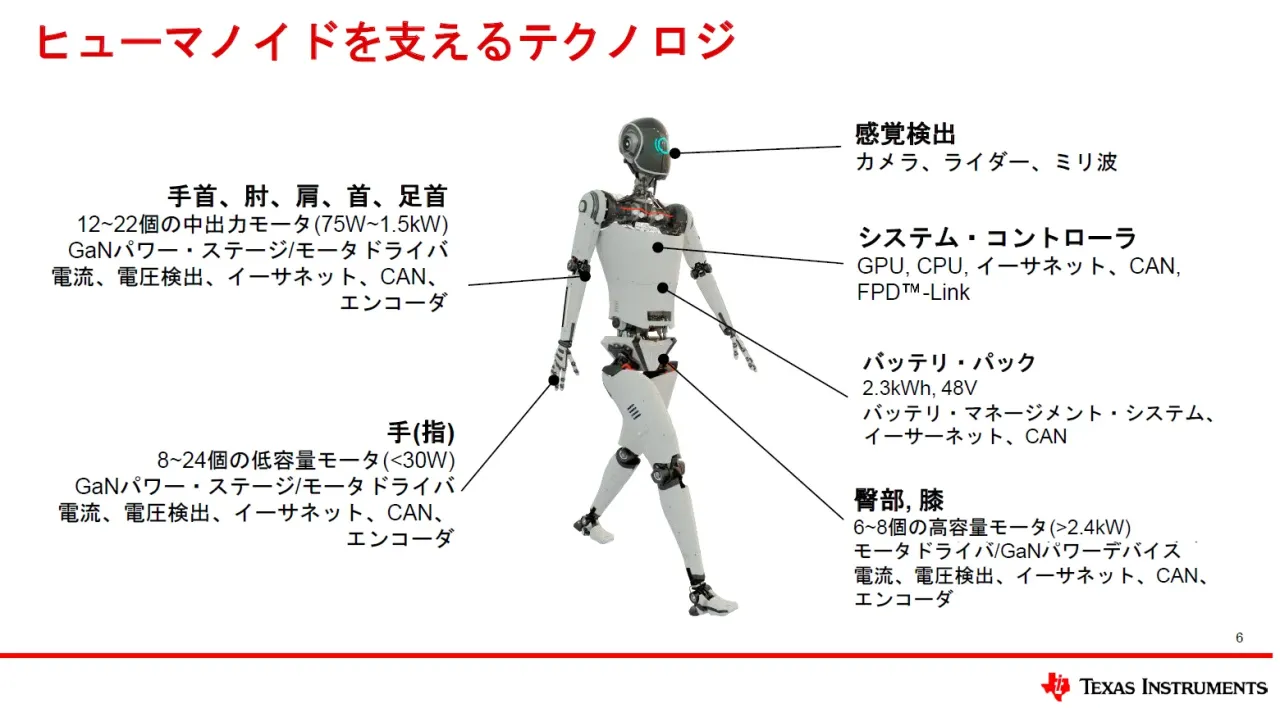
筋肉(Motor Control):開発上の最大の障壁は“熱”の問題である
人間らしい滑らかな動作のためには、全身に多数の関節(モーター)が必要となる。ここで開発者の最大の敵となるのが、物理的な「熱」の問題だ。
数十個の高出力モーターを駆動すれば、パワー半導体から熱が発生する。これを冷やすために巨大なヒートシンク(放熱板)やファンを取り付ければ、ロボットの自重は増し、身体は肥大化する。重くなればさらにパワーが必要になり、熱設計上の負のループに陥る。
この負のループを断ち切る鍵として初山氏が挙げたのが、次世代パワー半導体「GaN(窒化ガリウム)」の活用だ。従来のシリコン半導体に比べ、電力損失(=発熱)を劇的に低減できるGaNを用いれば、冷却機構を削ぎ落とすことが可能となる。人間サイズの筐体に強力なパワーを詰め込むには、熱設計の根本的な革新が不可欠なのだ。
神経(Communication):ケーブルの重量と断線リスク
全身のセンサーとモーターをつなぐ「神経」にあたる通信ネットワークは深刻な課題だ。従来のような太い通信ケーブルを束ねて配線すれば、その結果、重量増による負荷が生じ、可動性や信頼性を損なう要因となる。ここで求められるのが、自動車産業などで培われたシングルペア・イーサネットのような技術だ。わずか2本の細いケーブルで、ギガビット級の高速通信と電力供給を同時に行う。これにより、ロボット内部の配線重量と複雑さを劇的に削減し、システムの信頼性を高めることができる。
感覚(Sensing):プライバシーと環境耐性のジレンマ
ロボットの「目」としてカメラは一般的だが、暗闇や粉塵といった悪環境下では精度が落ちる上、プライバシー侵害への懸念もつきまとう。
そこで、電波を用いる「ミリ波レーダー」に注目が集まっている。環境条件の影響を受けにくく、プライバシーへの配慮を保ちながら周囲の存在や距離を検知できる点が大きい。公共空間や家庭内での稼働において、プライバシーに配慮しつつ安全を確保するセンシング技術の選定は、社会受容性を高める上で重要となる。
心臓(Power):バッテリーはただ長持ちすれば良いわけではない
これらすべてを動かす「心臓」としてのバッテリーシステム。稼働時間の延長はもちろん重要だが、リチウムイオンバッテリーを背負って人の近くで動く以上、発火事故などは許されない。
セル単位での電圧・温度監視を行う高度なバッテリーマネジメントシステム(BMS)が不可欠であり、異常があれば即座にシャットダウンする機能が求められる。単なる電池パックではなく、高度な制御機能を備えた電源システムでなければ、ヒューマノイドの心臓は務まらない。
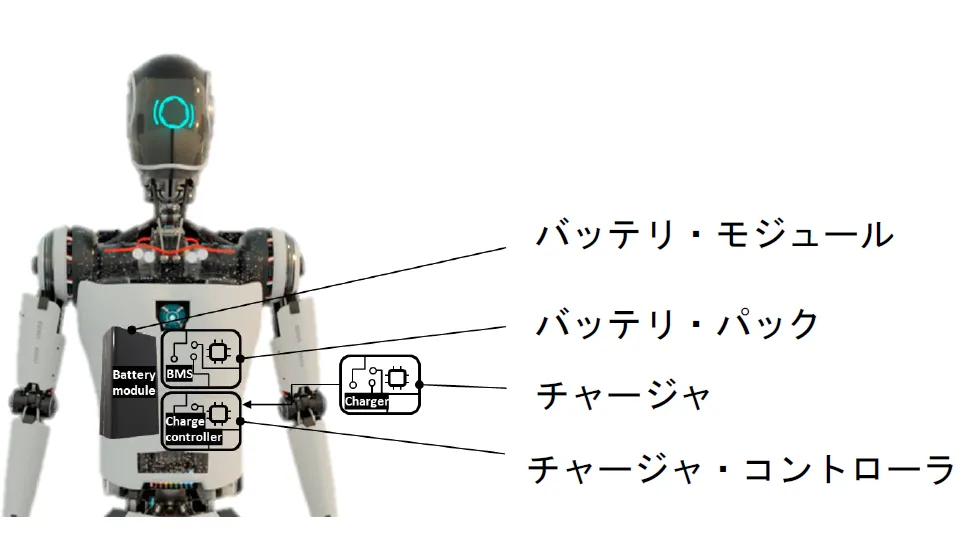 ヒューマノイドに搭載されるバッテリー例。高効率・シンプルを前提として、異常感知の制御も必須となる
ヒューマノイドに搭載されるバッテリー例。高効率・シンプルを前提として、異常感知の制御も必須となる
「機能安全」こそ実用化の決定打
これら5つの要素技術に加え、初山氏が特に重視した概念がある。それが「機能安全(Functional Safety)」だ。
研究段階であれば停止後に再起動すれば済むが、製品として社会に投入される場合はそうはいかない。故障発生時に、システムが異常を検知した際には、人に危険を及ぼさない形で確実に停止することが、国際規格として求められている。
「機能安全の実現は、理論上の議論ではなく現実的な障壁だ」と初山氏は語る。例えば、ヒューマノイド開発の先進企業である米Apptronik社は、同社のロボット「Apollo」(テキストリンク:https://apptronik.com/)の開発初期からTIと協業している。これは単に部品選定のためではなく、「どうすれば安全認証(SIL 2等)をクリアできるシステムを構築できるか」という安全設計の根幹を共有するためだ。
半導体メーカーがあらかじめ安全規格の認証を取得した部品を提供し、その証明書やマニュアルをセットで提供することは、ロボットメーカーにとって開発期間の劇的な短縮を意味する。安全性検証に要する膨大な作業を大幅に削減でき、ロボットの中核となる動作アルゴリズムの開発へと資源を集中できるからだ。「単なる部品供給ではなく、安全基盤そのものを提供する」。このアプローチこそが、群雄割拠の市場で勝ち抜くための時間短縮の鍵となる。
【編集後記】
「SFの夢」として語られがちなヒューマノイドロボットだが、今回の講演を通じて見えてきたのは、極めて泥臭く、しかし精緻なハードウェア技術の集積だった。熱をどう逃がすか、配線をどう軽くするか、万が一の故障時にどう安全を担保するか。これらはAIのデモ映像からは見えない領域だが、社会実装における本質的な課題そのものである。
こうした“地に足のついた技術領域”こそ、日本が歴史的に強みを育んできた分野でもある。精密なモーター制御、省電力化技術、そして何より「安全・品質」への姿勢。ヒューマノイドを構成する要素技術の多くに、日本には世界に誇れる知見がある。
AIという「脳」の進化だけでなく、それを支える強靭な「身体」がなければ、ロボットは現実世界で働くことはできない。デジタルとフィジカル、AIと制御、そして機能安全。これらを高度に統合するエンジニアリングの力が、これからのロボット産業の覇権を左右することになるだろう。
関連リンク


- share
-

-

-



