- 総合TOP
- 宇宙
- AI
- ロボット
- WEB3・メタバース
2025.09.12
“操作する人”から考える新しい働き方~【連載】自由に働ける社会を「遠隔就労」がつくる!(第2回)
 (連載一覧はこちら)
(連載一覧はこちら)
生産年齢人口の約5人に1人が、何らかの就労困難を抱えている現代。場所や時間に縛られない働き方「遠隔就労」が、課題を解決する糸口となるかもしれない。遠隔就労の社会実装を多方面からのアプローチで推進するのが「遠隔就労研究会」だ。研究会の運営主体は、電通総研、竹中工務店、ジザイエ、ユアサ商事(2025年9月現在)。各社の力を結集し、多くのステークホルダーと共に活動を進めている。RoboStepの当連載では、研究会と協力し遠隔就労の普及に向けた取り組みや考え方を発信している(【連載】自由に働ける社会を「遠隔就労」がつくる!)。
今回は2025年6月23日に行われた、研究会主催のイベント「“操作する人”から考える新しい働き方」のレポートをお届け。遠隔就労に携わる研究者から企業、様々な関係者が集まった当イベント。遠隔から現場を支援・操作する人々にフォーカスを当て、遠隔就労の最新技術や取り組みについて語られた。(文=RoboStep編集部)
※遠隔就労研究会 第1回のイベントレポートはこちら(電通総研のサイトへ)
あらゆる課題解決に活きる「遠隔就労」とは
現場にある機械を、遠隔で操作する――機械によっては、これが難しい。普段、現場の作業者は「このくらい動かせば狙い通りの位置になる」という感覚のもと実機を操作している。頼りになるのは、ハンドルを操作した時の触感や目視での距離感といったリアルな情報だが、これが遠隔操作時には失われてしまう。この差異を埋めるためには、オペレーターの熟練度が重要だ。複雑な機械であるほど、かなりの練習量が要る。特に建設重機など、操作に危険を伴う機械であれば、なおさら慎重にならざるを得ない。
「かといって、操作を簡単にすればすぐに上達するという訳ではありません」。そう語るのは、⼈間拡張技術の開発に携わる広島大学 大学院先進理工系科学研究科教授 栗田 雄一 氏。遠隔操作スキルの効率的な習得方法、そして使いやすいインターフェースは何か。栗田氏は持論を展開する。
 広島大学 大学院先進理工系科学研究科教授 栗田雄一 氏
広島大学 大学院先進理工系科学研究科教授 栗田雄一 氏
先述の通り、機械の遠隔操作に慣れるまでは十分な練習が避けられない。しかしオペレーターの側に「やらされ感」があると、効果的な学習は期待しにくい。ましてやオペレーターが遠隔操作を行う際には、身体的・精神的・時間的制約など多様な事情がある場合も想定される。「ストレスなく、楽しく、早く」スキルを習得できるような仕組みとインターフェースの構築は、遠隔就労社会において大事なテーマだ。
学習ストレスを軽減し、効率的に操作スキルを習得するには「Sense of Agency(主体感)」が必要だと栗田氏は語る。「主体感とは、自身が体を動かした結果が機械に伝わり、意図通りの動きをしたという実感のこと。例えばショベルカーの操作訓練。オペレーターが操作レバーを動かすと、それに従ってショベルカーの動きが変化する。この変化を感じ取り『このくらいレバーを動かせば、狙い通りに機械が動く』という実感こそが、主体感です。その感覚をもって、次の操作の調整を行う。こうしたフィードバックループを通じてさらに主体感が養われ、より早く上達できるようになります。『自分の意思と行動が、結果に直接繋がっている』と感じること。これが作業へのモチベーションや学習効果の向上につながるわけです。遠隔操作のインターフェースを開発する際は、この主体感を大事にしています」(栗田氏)。
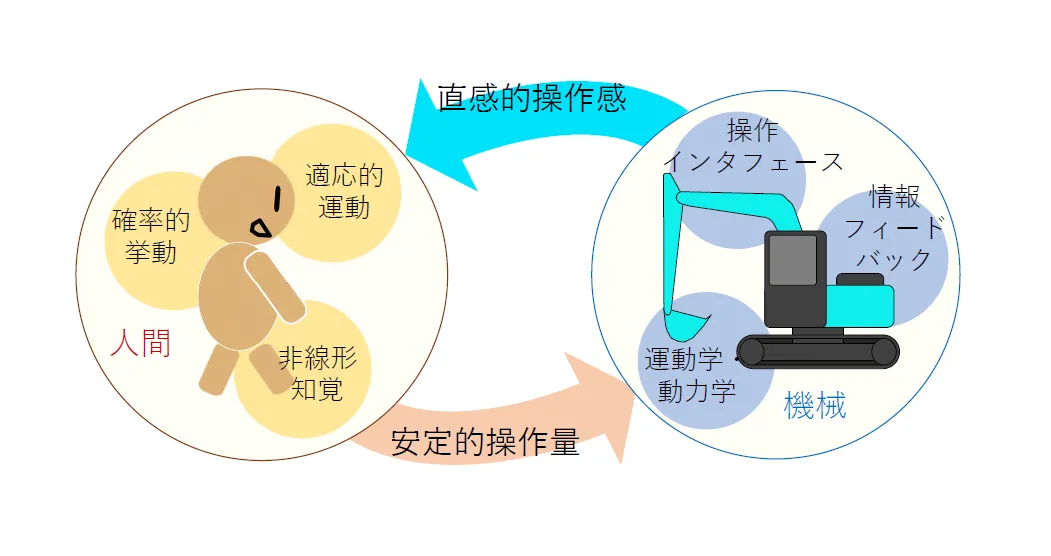 (引用:栗田氏 投影資料より)適切な操作量で、思い通り動いたという実感がインターフェースには求められる。この差分が大きいと、オペレーターはストレスを感じやすい
(引用:栗田氏 投影資料より)適切な操作量で、思い通り動いたという実感がインターフェースには求められる。この差分が大きいと、オペレーターはストレスを感じやすい
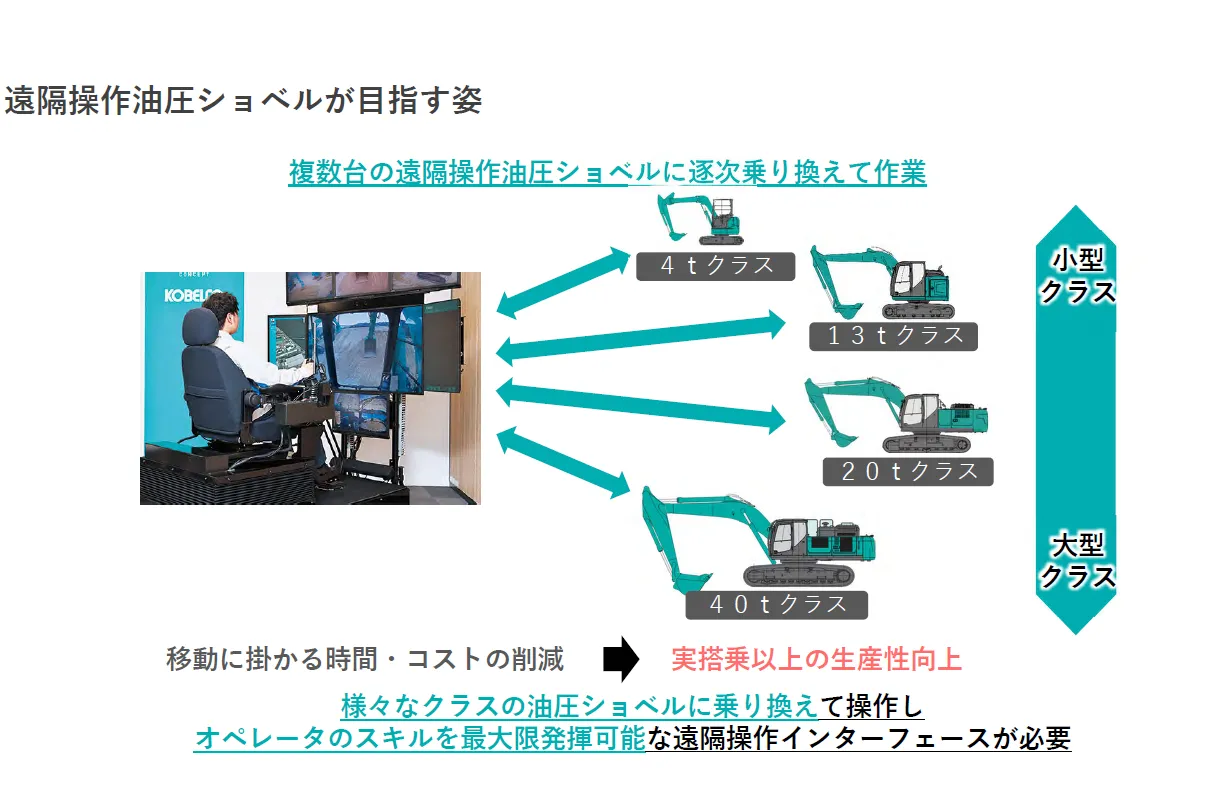
機械操作の学習は1台では済まない。サイズの異なる機械を操作する際は、また感覚が変わる。例えばミニショベルカーから大型のショベルカーに乗り換えると、同じレバー操作量でも機械のサイズや出力が異なるため、脳内の操作イメージを変更しなければならない。この切り替えがうまくいかないと、誤った操作につながるおそれがある。小さい機械のつもりで巨大な重機を動かすと、意図せず大きく動かしてしまい事故の要因になる。特に遠隔操作の場合、物理的に「乗り込む」という過程がないため、肌感覚でも切り替えにくい。
よってオペレーターが機械を乗り換えた際、安全に操作できる配慮も、インターフェースには必要だ。例えば機械の乗り換え時に、次に操作する機械がどのように動くか事前に動画で見せること。これで作業者におおよその感覚を知らせるだけでも操作のパフォーマンス低下を防げることが分かっている。
 (引用:栗田氏 投影資料より)遠隔操作インターフェースの例。操作による出力の割合を、触感でオペレーターにフィードバックする仕組みも開発中という。オペレーターが機械の「余裕」や「限界」を感じ取れるようになる
(引用:栗田氏 投影資料より)遠隔操作インターフェースの例。操作による出力の割合を、触感でオペレーターにフィードバックする仕組みも開発中という。オペレーターが機械の「余裕」や「限界」を感じ取れるようになる
栗田氏は現在、複数のインターフェース開発に着手している。実機と同じ感覚で操縦できるもの、スマートフォンなどのデバイスで使えるものなど多岐にわたる。
「遠隔就労が最終的に目指すものの一つが、ウェルビーイング(個人・社会が良好な状態)です。ずっと仕事を続けても心身を消耗せず、余裕のある世界を描きたい。どんな操作者にも優しいインターフェースを構築することは、大事な取り組みの一つです。明るい未来を作るための技術開発を進めていく。それが技術者の、そしてこの研究会の役割でもあります」(栗田氏)。
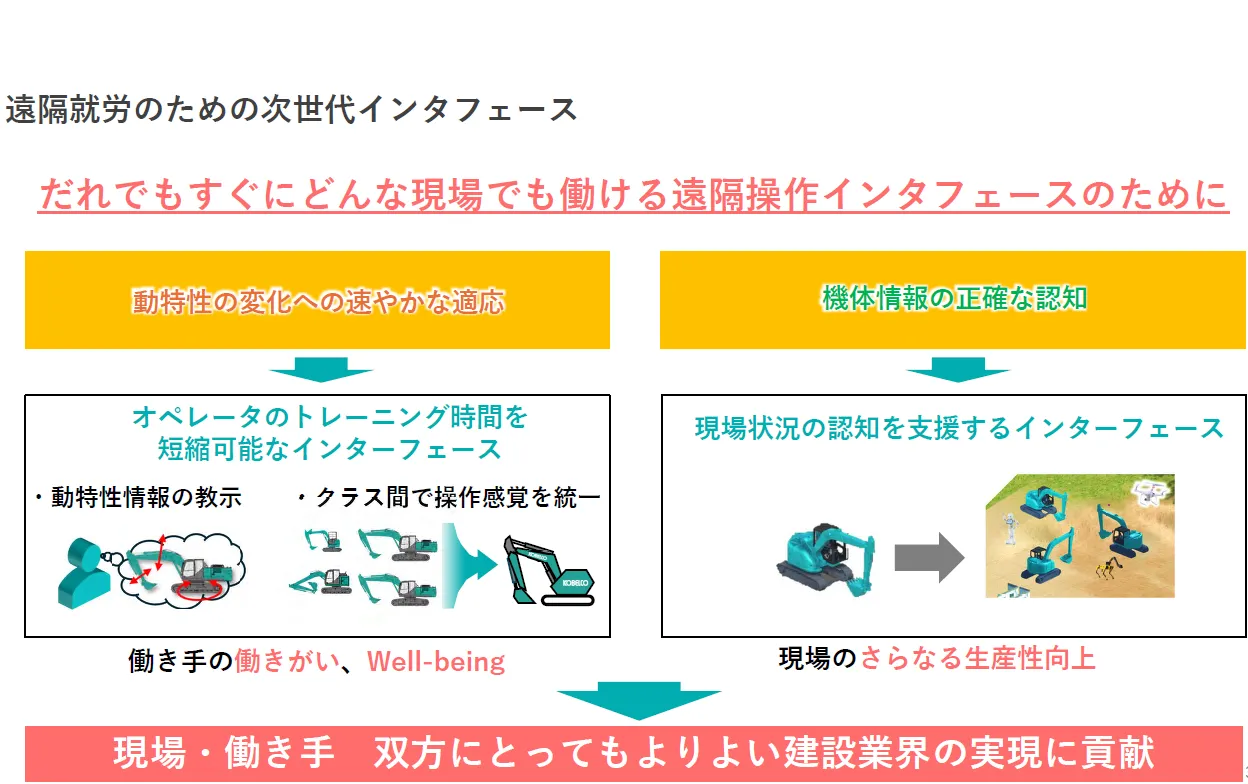 (引用:栗田氏 投影資料より)「現地にいるかのように機械を遠隔操縦する」ことを一つの目標に、安心安全な遠隔就労環境の実現を目指す
(引用:栗田氏 投影資料より)「現地にいるかのように機械を遠隔操縦する」ことを一つの目標に、安心安全な遠隔就労環境の実現を目指す
外出できなくても、種をまく喜びを。就労困難者支援の新モデル
遠隔就労の浸透において重要なのは、機械操作の改革だけにとどまらない。働く人に向けた仕組みづくりも重要だ。「人間と人間が場所を超えて連携し、仕事を分担する」新しい遠隔就労の形を示しているのが、就労困難者を専門としたBPOプラットフォーム「NEXT HERO」だ。企業から受注した業務を、就労機会を提供する就労継続支援事業所やシルバー人材センターなどに再委託することで、就労困難者の働く機会を創出している。
NEXT HEROを運営するVALT JAPAN株式会社 BPO事業部 事業部長 金庭 玲奈 氏は「就労希望者に合った仕事が受託でき、発注企業にとっても質の高い業務が保証されます。遠隔就労における巨大なプラットフォームとしていきたい」と意気込みを語る。
VALT JAPANはこのモデルを通じて、全国約2万1千箇所の就労継続支援事業所と連携し、遠隔ロボット操作、ウェブサイト構築、清掃業務など、400種類以上の業務を創出している。
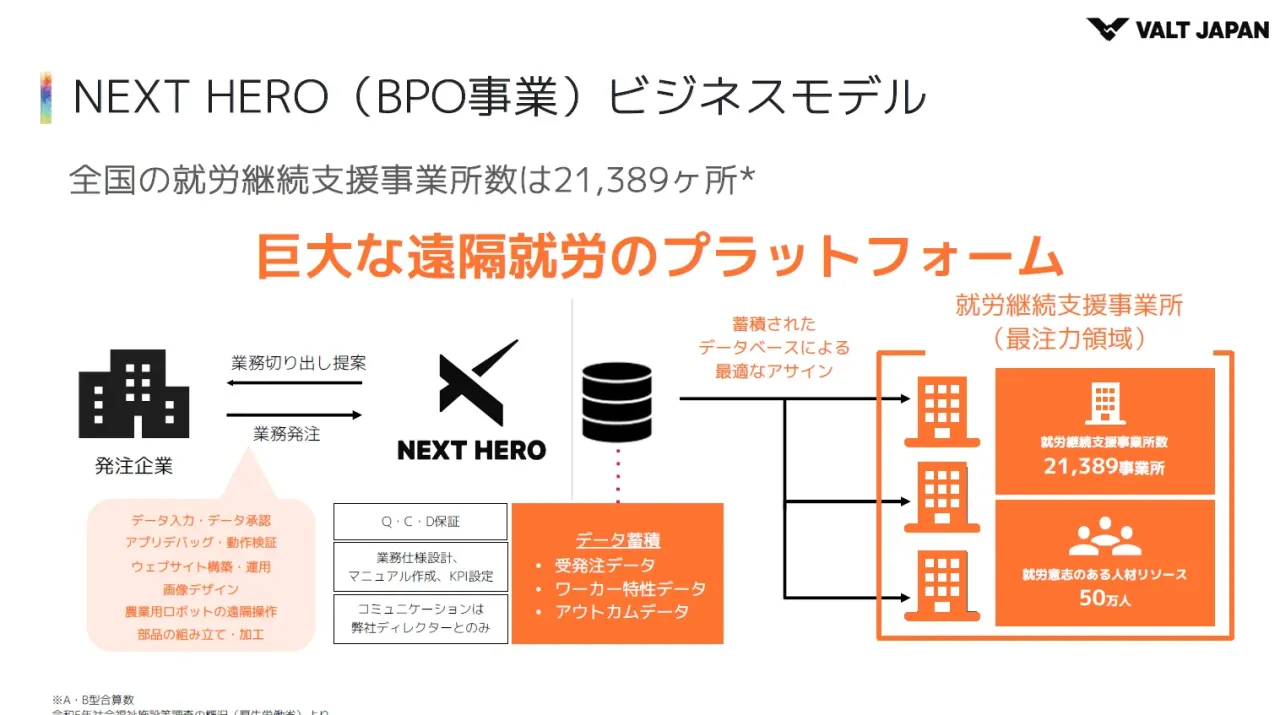 (引用:金庭氏 投影資料より)NEXT HEROのビジネスモデル
(引用:金庭氏 投影資料より)NEXT HEROのビジネスモデル
例えば「スマート市民農園プロジェクト」では、神奈川県のオペレーターが兵庫県の農園にある農業用ロボット「ファームボット」を遠隔操作し水やりや種まきを行う。「オペレーターとなった方からは、外に出ることが難しくても、自分の手で農作物が育てられたと喜びの声をいただいています」(金庭氏)。帯業務などを遠隔でサポートするといった活用もできますから、どの業界でも遠隔就労が活きると考えています。
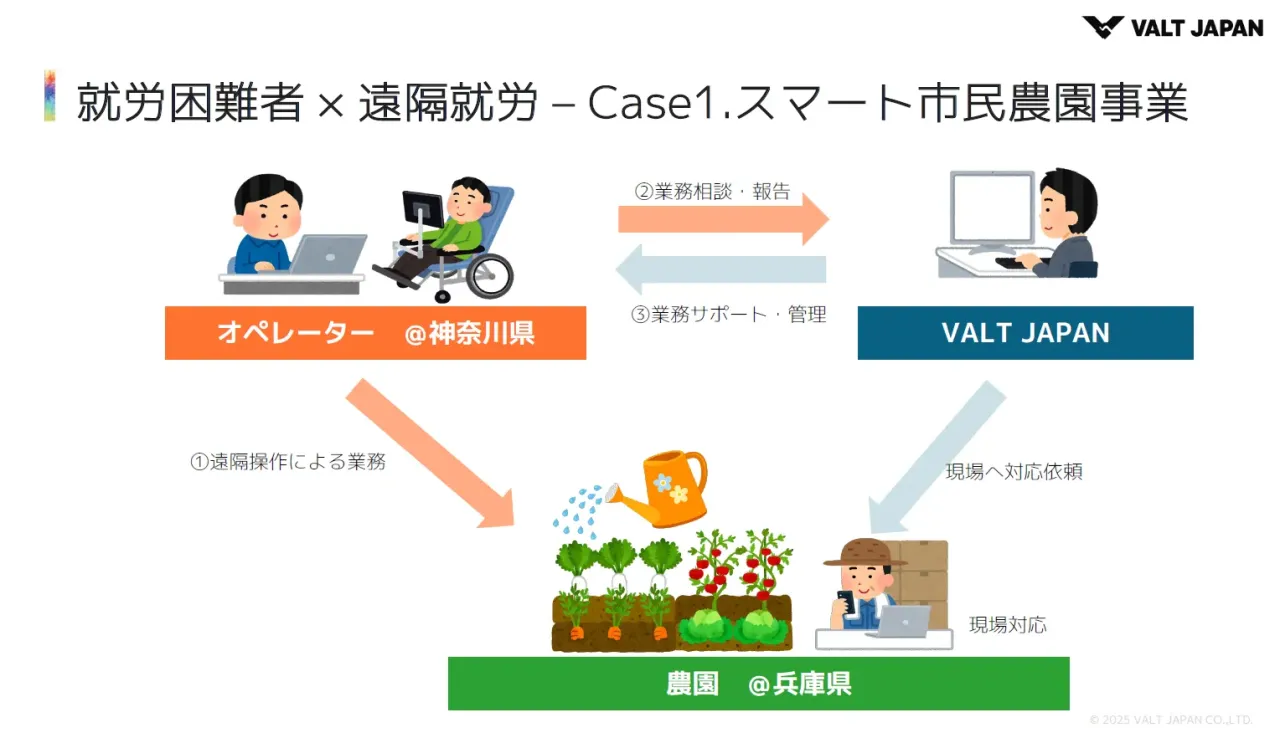 (引用:金庭氏 投影資料より)
(引用:金庭氏 投影資料より)
こうした仕組みには、就労困難者への丁寧なケアが不可欠だ。遠隔就労の課題として、現場の状況把握が難しいこと、本社との接点減少、モチベーションの不安定さなどが挙げられる。VALT JAPANは最適な環境整備とサポート体制でこれらを克服する。個々の障害特性に応じた作業環境の提供はもちろん、心理的ケアも欠かさない。障害特性や本人の指向性を考慮した人材アサインや常駐スタッフによる相談対応、チャットでの細やかなコミュニケーションを通じて、ワーカーの心理的安全性と持続的な就労を支えている。
「日々のやり取りの中で、ワーカーの行動に対するアンテナを張り、小さな変化を見過ごさないよう慎重に運用管理しています。発言の内容が『大丈夫です』『頑張ります』だけで、質問がなかったりした場合は要注意です。チャットでの誤字脱字が増えたり、レスポンスに変化が生じたりしているなら、体調不良などの可能性もあります」(金庭氏)
 VALT JAPAN株式会社 BPO事業部 事業部長 金庭 玲奈 氏
VALT JAPAN株式会社 BPO事業部 事業部長 金庭 玲奈 氏
遠隔就労に携わったワーカーや職員の感想を見ると、「仕事をやりたいから事業所に通う回数が増えた」「就労意欲が高まり、現在就職活動を行っている」「ひきこもりだったワーカーが天気や街の様子といった外の世界への興味を示し始めた」などの意識変容が起きているという。「そこから行動変容につながり、体調改善やライフスタイルの変化にもつながっていくなど、遠隔就労の効果はQOL向上にも期待できると感じています」(金庭氏)。遠隔就労技術が発展し、就労困難者が参画できる仕事が増えれば、労働人口も増える。誰もがヒーローになれる働きやすい未来をつくっていけるはずだ。
段差も砂利道も何のその! ロボットがつなげる現場と本社
建設業界において、現場の生産性向上は長年の課題だ。株式会社竹中工務店は、米国ボストン・ダイナミクス社の4足歩行ロボット「Spot」を活用し、施工管理業務の自動化・遠隔化を進めている。
遠隔地からSpotを操作し、現場に行かずとも搭載された360度・ズーム・赤外線カメラから状況を確認できるシステムを構築。さらにモニターやマイク、スピーカーを介し、遠隔で現場作業員とコミュニケーションを取り、安全巡視などに参加することも可能にしている。建設現場は段差や砂利道が多く、移動は簡単ではない。それでも高い走破性を持つSpotなら、階段昇降や斜面移動もできる。活用の幅は広い。
 カメラをはじめ、多彩な機械が装備されているSpot
カメラをはじめ、多彩な機械が装備されているSpot
株式会社竹中工務店 技術研究所主任研究員 神山和人 氏は「Spotは遠隔操縦だけでなく自律移動もできます。予めルートを指定しておけば、Spotが勝手に歩き回って必要な情報を集めてくれる。遠隔で巡回することも想定しています」と説明する。さらに「通信回線を通して、40キロ離れた建設現場と本社をつないで現場の様子が確認できました。今後は遠隔による施工管理の自動化を目指します」と、現状の成果と目標を報告した。
 株式会社竹中工務店 技術研究所主任研究員 神山 和人 氏
株式会社竹中工務店 技術研究所主任研究員 神山 和人 氏
加えてオペレーターに対する視覚情報の再現にも取り組んでいる。没入感高く現場状況を把握できるよう、直径6mのドーム型視覚シミュレータ「visiMax® Mobile」を開発した。同社 株式会社竹中工務店 技術研究所主任研究員 北野 信吾氏は、会場にデモ機を持参。「これをロボット建機などの遠隔操縦に使えないかと考えています。お客様に建築設計段階で、建物の空間を等身大で体感していただけます」(北野氏)。Spotからの映像を投影することで、まるで現場にいるかのような視覚体験を遠隔地から提供できるという。
ロボット建機など遠隔操縦においては課題もある。北野氏は続ける。「人間は200度近い水平視野を持っていますが、遠隔操縦席のモニターは魚眼レンズによる180度の視野のうち、ごく一部の範囲のみを見ていることになります。もっと広い視野を再現する装置が必要ですね。今後のさらなる技術開発が期待される。
 株式会社竹中工務店 技術研究所 主任研究員 北野 信吾 氏
株式会社竹中工務店 技術研究所 主任研究員 北野 信吾 氏
編集後記
今回のテーマでもある「操作する人」には様々な個人的事情や状況がある。それは身体的、精神的なものまで多種多様だ。あらゆる人々が個々の能力を発揮し、自分らしく活躍できる社会――。単純に「遠隔でモノを動かす仕組み」をつくるだけでは遠隔就労は実現できないことが分かるだろう。
さらに法的な制約、そして持続可能なビジネスモデルの確立といった複数の課題が存在する。専門性が高い分野は、就労困難者がスポットで参加するにはハードルが高い。
遠隔就労研究会が目指すのは、あらゆるステークホルダーを巻き込み、コミュニティを拡大していくことだ。実証フィールドを持つ企業や技術を持つ大学、そして遠隔操作を担うオペレーターとなる可能性のある人々。「全ての仕事において遠隔就労が当たり前となる未来を創り出す」ビジョンに向け、今後もその活動を追っていく。(続く)
関連リンク



- share
-

-

-



