- 総合TOP
- 宇宙
- AI
- ロボット
- WEB3・メタバース
2025.01.30
【連載】ソフトロボティクス最前線~“やわらかい”ロボットが拓く未来(第2回)
- share
-

-

-


社会実装に向けた入口に立つと言われる「ソフトロボティクス」技術について、東京国際工科専門職大学 工科学部 情報工学科 ロボット開発コース 西田 麻美 准教授に解説いただく連載の第2回。今回はソフトロボットの「活用」について解説頂きます。

東京国際工科専門職大学 工科学部 情報工学科 ロボット開発コース 准教授 西田 麻美
電気通信大学大学院 電気通信学研究科 知能機械工学専攻博士後期課程 修了。博士(工学)。 大学教員のかたわら、代表取締役として株式会社プラチナリンクを設立。メカトロニクス・ロボット教育および技術コンサルタントを専門に、人材育成支援に取り組む。自動化推進協会 常任理事技術委員長、電気通信大学一般財団法人目黒会 理事技術委員長などを歴任。日本設計工学会 武藤栄次賞Valuable Publishing賞、関東工業教育協会 著作賞、日本包装機械工業会 業界発展功労賞、一般社団法人日本・アジア優秀企業家連盟 アントレベンチャー賞、日本機械学会教育賞受賞など各方面で受賞実績多数。
前回に引き続き、ソフトロボットの魅力やポイントについて皆さまにご紹介いたします。今回は、試作品やプロトタイプを一般的に使えるようにしたソフトロボットの「実用化」や完成品を通して社会貢献活動に取り組んでいるソフトロボットの「活用」を中心に解説します。
ソフトロボットは「素材に注目」
さて、ソフトロボットは、21世紀初頭(2000年頃)に、ロボット分野の学術体系や方向性を大きく変える新しい研究領域として旋風を巻き起こしました。文部科学省科研費の新学術領域研究として「ソフトロボット学」のプロジェクトが出現したのも2018年と、まだまだ数年前のことです。
一方で、ソフトロボットの基幹の一つである「アクチュエータ(動力源)」の研究については、古くから行われており、
[5] 形状記憶合金
など、柔軟で変形する材料(人工筋肉)をはじめ、電気的な刺激によって反応する機能性材料(ソフトマテリアル)の研究など、多くの注目を集めています。
実際のところ、ソフトロボティクス分野では、素材のやわらかさやその材料が持つユニークな応答性、特有の物性といった面白さをマニピュレータやセンサ(検出機能)として見出している研究が散見されます。
そう考えると、ソフトロボットは、素材の研究、つまり、素材に対する問題意識と素材を理解しようとする研究者の思いが契機となり開花されたと言えるかもしれません。
ここで、ソフトロボットの事例とそのロボットの素材について図1に示します。
例えば、筆者の所属先である東京国際工科専門職大学ロボット開発コースでは、駆動源に形状記憶合金を、ボディにやわらかい風船を採用した人間の大人サイズの二足歩行ロボット(図1の④)の研究に取り組んでいます。転倒することなく、ふわりと歩くことができる本ロボットは、世界初のソフト二足歩行ロボットとして活躍の場を広げようと試みています。
研究では、教員と学生とが一丸となって、従来の歩行概念とは異なるアプローチで、ヒトの運動メカニズムの理解・解明にチャレンジしています(図2)。また、将来的に宇宙探査や警備分野など実用的な適用を考えた実験も行っています。
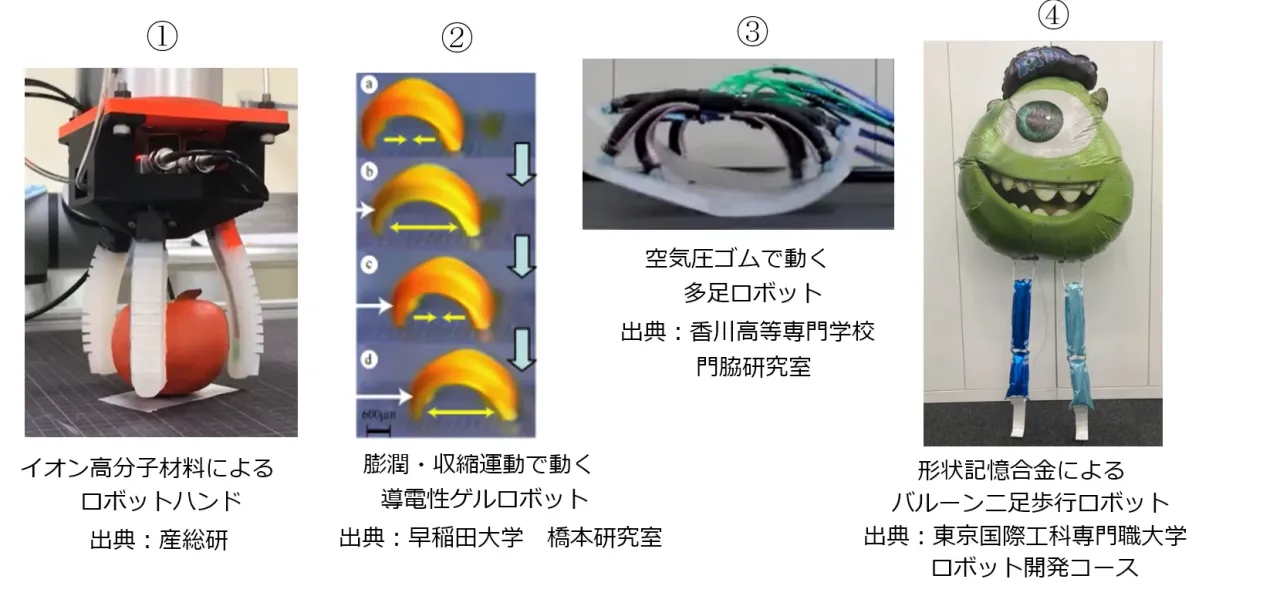
(図1) ソフトロボットと④柔軟な素材
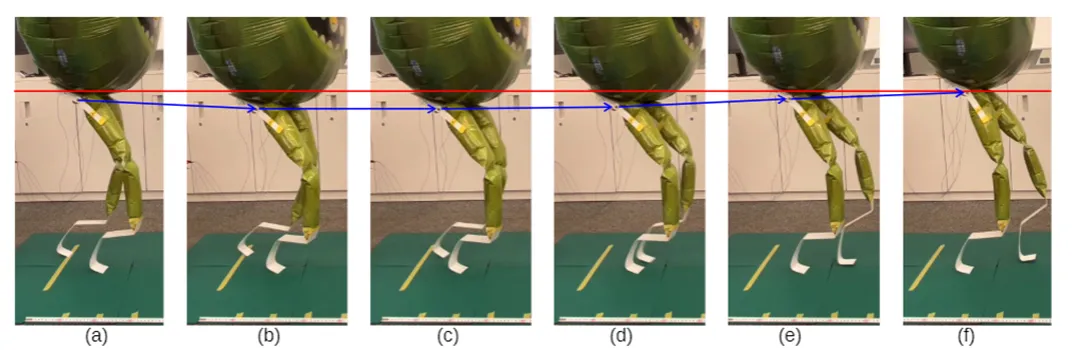
(図2) ソフト二足歩行ロボットの歩行解析
このように、やわらかいロボットは、
[4] 曖昧、かつ、しなやかであること
など、多くのイニシアチブがあります。素材との組み合わせ次第では、あらゆる現場に対応できる新しいソフトロボットの誕生も可能です。
近年では、「エネルギー効率の向上」「環境にやさしい省資源」「製品の軽量化」に貢献すべく、さらに一世代先を見据えた材料の開発が進められています。
例えば、伸縮性のあるクモの巣のような人工ネットや、直径が数nm長さが数μmの植物由来のナノファイバー、大きく屈曲する衝撃吸収材(ポリマー)など、ソフトロボットのベースとなる新しい素材分野との融合も期待できるでしょう。
ソフトロボットの実用化
ソフトロボットには多くのメリットがあります。しかし、実用化となると、あまり事例が少ないのも事実です。
その理由に、従来のロボット技術と比べられてしまうこと、つまり、
[3] 開発先行型でアプリケーションが後付けになっている
などの課題やデメリットがあり、利益を生み出す仕組みや顧客の獲得に難を要している点もうかがえます。現時点では、ソフトロボットの実用化に至るまでには、多くのハードルを越えなければならないのが実情です。
ソフトロボットで実用化されている商品
そうした中で、商品化に至っているソフトロボットもあります。今回は、展示会などに出展されているソフトロボットを取り上げ、その企業名と製品名について、いくつかご紹介したいと思います。
まずは、筆者が立ち上げた大学発ベンチャー企業の株式会社プラチナリンクの「ペラティン(商標登録)」(図3のa)です。ロボットは手のひらサイズのぺらっと薄い構造で、全方向移動可能なソフトロボットです。ペラティンの実用化に至っては、現場(企業側)から実践的なロボット研修・メカトロニクス教育(図3のb)などの相談・依頼が寄せられ、そのモチーフとして活路を見出したという背景があります。
大学での研究開発(2004年)⇒商品化(2015年)⇒現場に投入(2017年)後、かれこれ7~8年「教育分野」で活躍しています。

(図3)ソフトロボットとメカトロニクス教育(引用元:株式会社プラチナリンク/大学発ベンチャー企業)
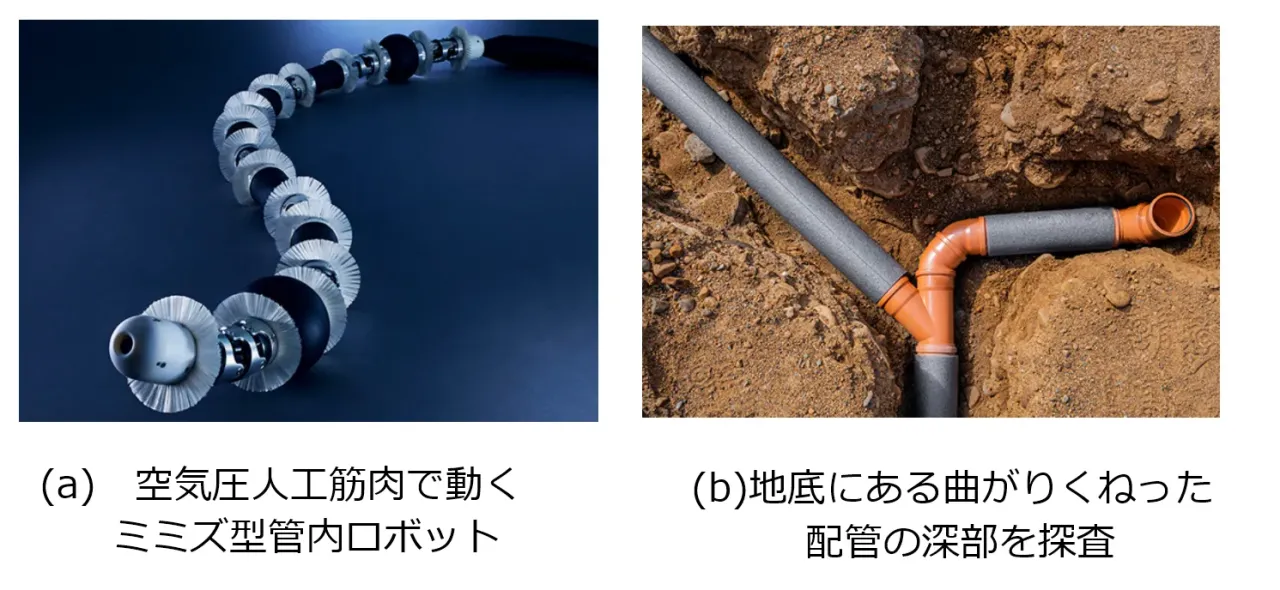
次にご紹介するのは、空気圧アクチュエータを使って体を伸び縮みさせ、ミミズのような動きで配管の深部まで移動するSoLARIS(ソラリス社)の「Sooha(ソーハ)」(図4のa)です。中央大学の中村太郎先生の手によってSoohaは誕生しました。
ロボットの先端には、カメラとライトがついており、管内の様子を撮影したり、映像を記録したりできます。また、空気圧で動くので、ガスや油で満たされた危険な環境下や配管の大きさがバラバラで、複雑な曲がりくねりの配管内でも体の厚みを自由に変えて、スイスイと移動できます(図4のb)。
現在、Soohaは進化を遂げており、超音波センサを搭載して管内深部の経年劣化を特定できるようになった「ウルトラソーハ」として2023年に発表されています。
最後にご紹介するのは、株式会社ブリヂストンの社内ベンチャーから誕生した「TETOTE and(テトテ アンド)」です(図5)。産業用ロボットの先端に人間の手のような柔軟なハンドを取り付けることで、紙のように薄くて柔らかいものや力を加えたら壊れそうな食品などを掴むことができます。
TETOTE andは、AIテクノロジーの進化に寄り添うことを前提に、柔らかい材料(ゴム人工筋肉)を活用して体現されており、人間の巧みな動作や生物の機能を模倣することで自然な運動生成を可能としています。将来的には、人間が掴めないものまで掴むことができるかもしれません。
その活躍を期待したいと思います。

(図5)ソフトロボットとハンド(手先)(引用元:株式会社ブリヂストン/社内ベンチャー)
いかがでしたでしょうか。
次回は、ソフトロボットを通して、ビジネスの可能性を引き出す取り組み方のポイントについて解説したいと思います。
関連リンク


- share
-
-
-


