- 総合TOP
- 宇宙
- AI
- ロボット
- WEB3・メタバース
2024.11.26
【連載】ソフトロボティクス最前線~“やわらかい”ロボットが拓く未来(第1回)ソフトロボティクスとは
- share
-

-

-


ロボットと聞き、誰もが頭に浮かぶ硬質かつ堅牢なイメージ。今回のコラムで扱うのは、そうしたイメージを覆す新たなロボットの領域です。柔らかい素材を使い、しなやかな動きを実現する「ソフトロボティクス」技術。20年ほど前から研究が進み、今いよいよ社会実装に向けた入口に立っています。本連載では、ソフトロボティクスの現在地から、研究、ビジネスの可能性に迫ります。寄稿頂くのは、ロボット・メカトロニクス・自動化システムを専門とする東京国際工科専門職大学 工科学部 情報工学科 ロボット開発コース 西田 麻美准教授です。「ソフトロボティクス」の世界を3回にわたってお届けします。

東京国際工科専門職大学 工科学部 情報工学科 ロボット開発コース 准教授 西田 麻美
電気通信大学大学院 電気通信学研究科 知能機械工学専攻博士後期課程 修了。博士(工学)。 大学教員の傍ら、代表取締役として株式会社プラチナリンクを設立。メカトロニクス・ロボット教育および技術コンサルタントを専門に、人材育成支援に取り組む。自動化推進協会 常任理事技術委員長、電気通信大学一般財団法人目黒会 理事技術委員長などを歴任。日本設計工学会 武藤栄次賞Valuable Publishing賞、関東工業教育協会 著作賞、日本包装機械工業会 業界発展功労賞、一般社団法人日本・アジア優秀企業家連盟 アントレベンチャー賞、日本機械学会教育賞受賞など各方面で受賞実績多数。
ソフトロボティクスとは?
「ソフトロボット」と聞くと、どのようなイメージが浮かびますか?と問いかけると、「ソフトウェア(software)」のソフトから構成されているコンピュータ・ロボット!と答える方も少なくはありません。ソフトロボットの「ソフト」とは、ずばり、「やわらかさ」や「柔軟=フレキシブル」を意味します。やわらかさを利用して、社会の課題を解決するロボット分野を「ソフトロボティクス」と呼びます。現状として、認知度はまだまだ低い分野ですが、本記事では、近年トレンドとなりつつあるソフトロボットについて、わかりやすく解説していきます。
ソフトロボットの役割
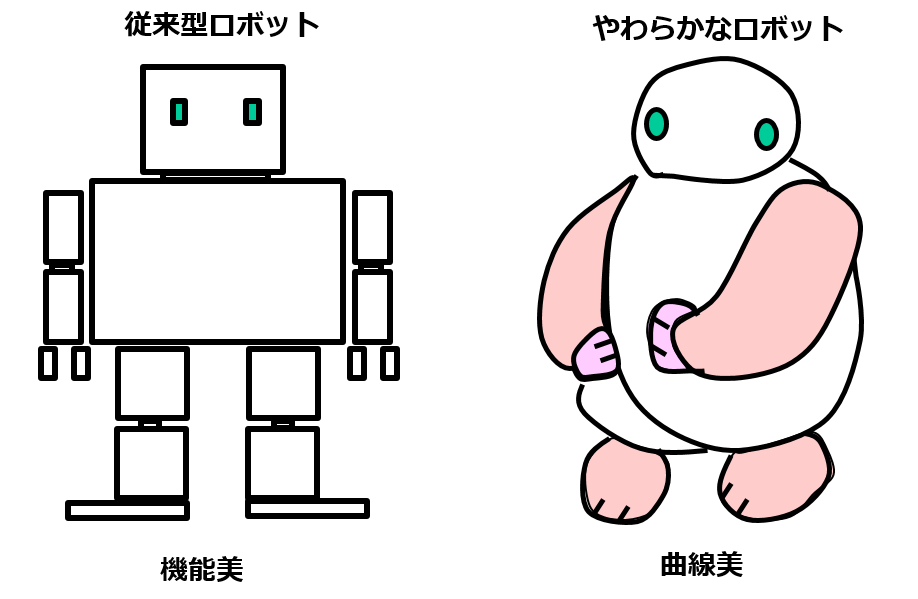
一般にロボットといえば、産業用ロボットのように硬くて頑丈な金属でできているロボットが代表的です。硬い素材のロボットは、変形しいくいため、何度も繰り返し動かしたり、高速に動かしたりしたとしても、正確、かつ、確実に、動作を実現できます。このようなロボットは、高い精度や再現性が求められる生産現場や製造現場をはじめ、自動車、医療機器など幅広い分野で大活躍しています。
一方で、硬いロボットにはできなかった部分や領域をやわらかいロボット(機械)で解決しようとするのがソフトロボティクスの狙いの一つでもあります。
例えば、機械的にカクカクした動きではなく、クラゲなどの生物に見られる「しなやかな動き」、つまり、柔軟だけど壊れにくく、なめらかだけど弾力のある性質や形、姿といったポテンシャルを実社会に生かそうとする試みです。
このアプローチでは、従来の硬いロボットとは、異なる目的やサービス、そして、設計思想(目的とする「機能」のために果たすべき「構造』を決める行為)が求められます。
では、ソフトロボットは実際に、どのような現場で活躍が期待されるのでしょう。それにはまず、ソフトロボットの観点から、「やわらかさ」について理解する必要があります。
ソフトロボットの「やわらかさ」について
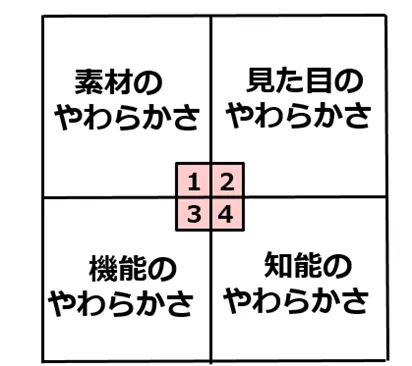
ソフトロボティクスの観点から見た「やわらかさ」には、
【1】素材のやわらかさ(やわらかい材料・素材を使っていること)
【2】見た目のやわらかさ(ロボットの内面から放つ優しさ、雰囲気)
【3】機能のやわらかさ(しなやかな動きや曖昧な動作)
【4】知能(制御)のやわらかさ(多様な作業を柔軟に行える情報処理能力)
があります。
そして、それぞれの組み合わせや擦り合わせによって、ソフトロボットが誕生しています。特に、やわらかな「素材」、加えて、やわらかな「機能」を有するロボットは、ソフトロボティクスの業界を大きく牽引しています。
ソフトロボットの目的
ここで、ソフトロボットが果たすべき目的とは何かについて考えてみましょう。それには、素材の硬いロボットと、素材の柔らかいソフトロボットの性質を比較することでヒントが得られます。
例えば、硬い素材のロボットは頑丈だけど、ぶつかったときの衝撃は大きく危険です。反対に、柔らかい素材のロボットは脆弱だけど、ぶつかったときには材料が変形する(運動エネルギーの多くが変形する仕事に変わる≒エネルギーが小さくなる)ので安全・安心です。
物事には必ず二面性があるように、両者のロボットにも長所と短所があり、お互いに進むべき道が交差しています。複雑で重いという前者に対して、簡単で軽くする、という着想です。このように、ソフトロボットには、ソフトロボットならではの目的や役割があります。
具体的には、硬いロボットの欠点や弱点を補完する領域での活躍をはじめ、従来のロボットでは、足を踏み入れることができなかった前人未踏の分野、例えば、生命の神秘を探る有力な手掛かりを見出すなど、ソフトロボットには多くの可能性が秘められています。
ソフトロボットの歴史
では、近年急速に開発が進みつつあるソフトロボットが、これまでどのような歴史をたどってきているのか簡単に説明します。
ソフトロボットの特徴は、「素材」と「機能」にあると先ほど説明しましたが、これらをもう少し専門的な言葉を使って表現すると、「素材は機構」、「機能はアクチュエータ」に置き換えることができます。
人間が自由自在に動く(運動する)ことができるのは、「骨格」と「筋肉」があるからですが、ロボットも同様に、「骨格=機構」、「筋肉=アクチュエータ」の2つの要素があること、または、両者を一体化して組み込まれることが基本です。
とりわけ、ソフトロボットが面白いのは、タコやイカのように、「動く部分」と「動かす部分」を区分けせずに、一本化できる(筋肉でできた足になる)」という点です。
ここでアクチュエータについて簡単に説明しますと、アクチュエータは、動力源と訳され、動力を機械的な運動に変える変換器です。「産業界の米」と言われるモータ(電動機)もその一つです。ロボットは、アクチュエータによって、上下に動かしたり、回転したり、力の強さや速度も変えることができます。
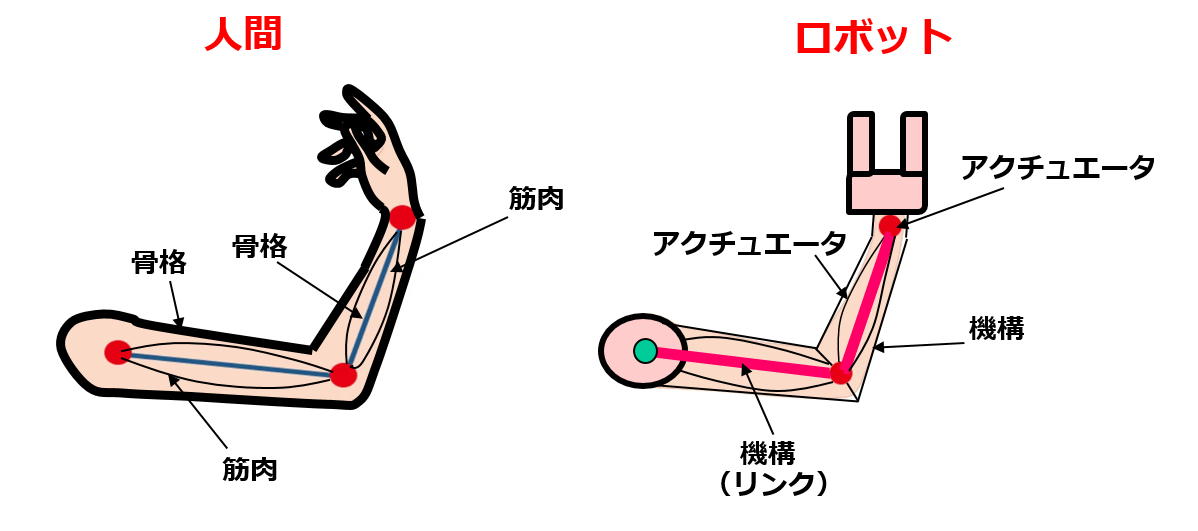
図3 動作(運動)に必要な要素(引用:西田麻美准教授講義用資料より)
さて、我が国のソフトロボットの研究にさかのぼってみると、広がりの発端の一つは、ソフトアクチュエータと呼ばれる「人工筋肉」が開発(1975年頃~)され、その応用としてソフトロボットにつながっていった、という経緯があります。
形状記憶合金や空気圧で駆動するソフトアクチュエータなど、数多くの人工筋肉の研究が進みました。平たく言えば、「鶏(ソフトロボット)が先か、卵(ソフトアクチュエータ)が先か」という循環的因果性に包含されながら、業界自体がアメーバーのように凸凹と繰り返し、発展してきたとも読み取れます。
もう一つは、機械に、生物の形態や運動機能を取り入れようといった生物模倣による方向からの発展です。ミミズ、べビ、昆虫など、1970年~1980年代頃に、先駆的な研究が数多く行われました。
やがて、「ソフトロボティクス」というキーワードが、1999年に日本ロボット学会誌で発表され、2000年からは多くのソフトロボットが開発されます。とはいえども、実際のところ、「ソフトロボティクス」をどう定義したらよいかを考える、という会議(2010年)も国内では行われており、実用化を含め、まだまだいろいろな課題を抱えつつ、手探り状態に進んでいるのが現状です。
また、ソフトロボットに関する専門ジャーナルの発刊(2013年)や初のRoboSoft国際会議(2018年)も、ごく最近のことであり、現在社会にソフトロボットがどのような形で一石を投じるのか、今後の展望に期待されます。
いかがでしたでしょうか。次回は、ソフトロボットの数々の事例や実現化(製品化)されているロボットを解説し、ソフトロボットで大学発ベンチャー事業を起業した私自身の体験やそのときのポイントなども含めまして、ご紹介したいと思います。
関連リンク


- share
-
-
-


