- 総合TOP
- 宇宙
- AI
- ロボット
- WEB3・メタバース
人型ロボットが社会に溶け込むための最大の課題は「安定した移動」だ。二足歩行のロマンを追う影で、多くの開発者が機体のバランス制御や複雑なメカ設計に膨大な時間を費やしてきた。しかし、実用化を急ぐ現場では、いま全く別の選択肢が注目を集めている。
株式会社CuboRexが開始した「ロボット台車」の受託開発サービスは、ロボットの「頭脳」や「腕」の開発者が、自らが担うべき本質的な価値創造のプロセスに専念できる環境を提示した。この「分業」という決断が、日本のフィジカルAI実装を加速させる新たな推進力となろうとしている。(文=RoboStep編集部)
「床面」から「棚」まで。1,000mm昇降がもたらす実用性
(引用元:PR TIMES )
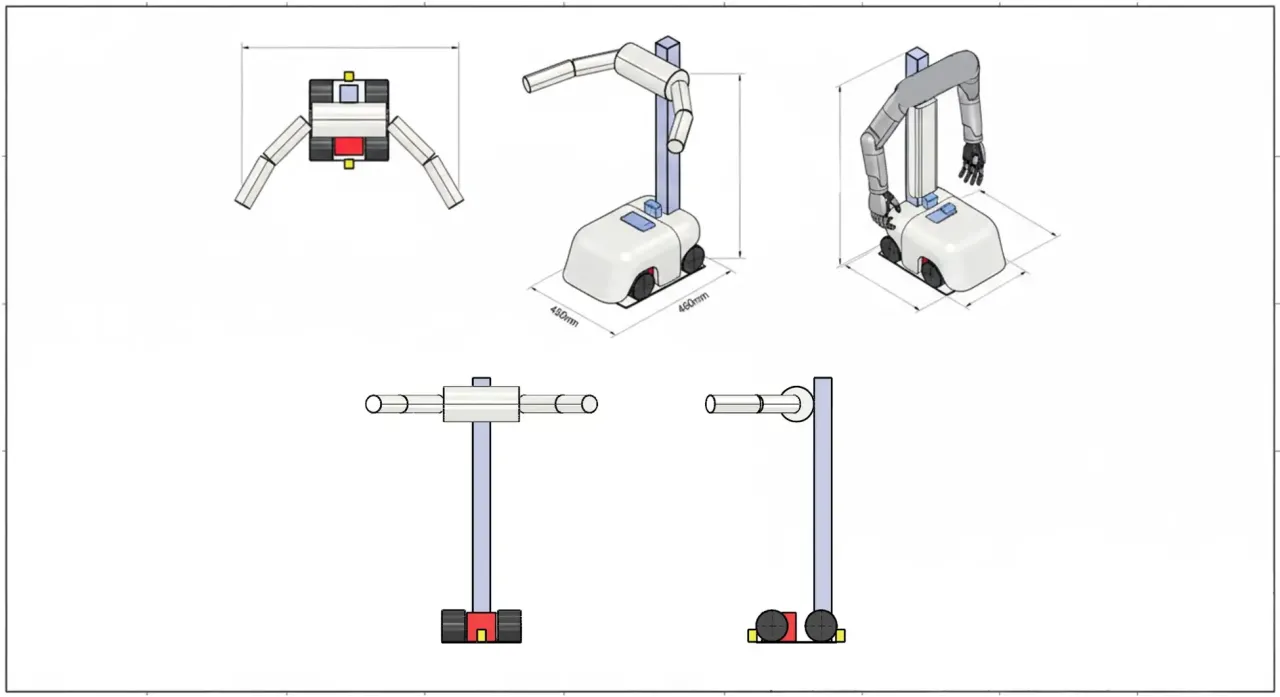
不整地ロボットのパイオニアであるCuboRexが今回提供を開始したのは、ヒューマノイド向けに特化した台車ユニットの開発サービスだ。このサービスが提供するのは、最新のロボット開発プロジェクトに不可欠な「安定した足回り」と「高い拡張性」である。
台車ユニットの最大の特徴は、地上高400mmから1,400mmの間を昇降できる1,000mmの長ストロークリフトを標準で備えている点だ。これにより、床にある荷物のピックアップから、高い棚への精密な作業までを一台でカバーする「セミヒューマノイド(上半身が人型で、下半身が車輪のロボット)」の構築が容易になる。
さらに、四輪駆動のメカナムホイールとサスペンションを備えた足回りは、300kgの全体可搬重量を支えつつ、全方位への自在な移動を可能にした。特定のプラットフォームに縛られず、顧客が開発中の上半身ユニットやセンサー構成に合わせてインターフェースを最適化できるカスタマイズ性の高さも、スピード感を重視する研究機関やスタートアップにとって大きなアドバンテージとなるだろう。自社で一から移動基盤を設計・製作する手間を省き、即座に実証実験フェーズへ移行できる環境が整った意義は大きい。
 (引用:CuboRex公式)
(引用:CuboRex公式)
物理的制約をアウトソース。実装を加速させる「ハードの共通化」
このサービスがロボット産業にもたらす本質的な価値は、ハードウェアの「プラットフォーム化」による開発サイクルの劇的な短縮だ。
現在、ロボット開発の主戦場は、物理世界を理解して行動を生成するAI(VLAモデルなど)へと移り変わっている。知能の開発を担うエンジニアにとって、移動用のシャーシ(※)を設計・製作することは、もはや「コアではない重労働」として戦略的に切り離されるべきフェーズへと移行している。この「開発リソースの選択と集中」という流れが、必然的に、機体の形態そのものを実用性に基づいて再定義する動きへと繋がっているのだ。
(※)トレーラーの荷台部分やフレーム構造のこと
物流や製造現場において、ロボットは必ずしも二足歩行である必要はない。むしろ、強力な双腕と昇降する胴体、そして安定して全方位に動く車輪を組み合わせたセミヒューマノイドこそが、実務を担う上での現実的な正解となることもあるだろう。信頼性の高い下部ユニットを専門家から調達し、自らは「頭脳」や「指先の動き」といった付加価値の源泉にリソースを集中させる。この合理的な分業体制は、かつてPC業界や自動車業界が経験した産業構造の成熟プロセスそのものと言えるだろう。
日本のロボティクスは「全てを自前で作る」という自前主義を脱し、高度なモジュールを組み合わせて「最速で価値を社会へ実装する」フェーズへと突入した。CuboRexが提示した「足回りのアウトソーシング」という選択肢は、日本の企業がグローバルな開発スピード競争で勝ち抜くために不可欠なインフラとなるに違いない。かつて動力源としてエンジンを調達したように、これからは「信頼できる足」を調達することで、日本のロボット実装はさらに加速していくはずだ。



- share
-

-

-



