- 総合TOP
- 宇宙
- AI
- ロボット
- WEB3・メタバース
ロボット開発において、物理世界を視覚情報だけで捉える手法は、長らく「高い壁」として立ちはだかってきた。「形」は見えても「硬さ」や「重さ」が分からなければ、対象物を適切に扱うことはできない。この欠落したピースを埋める技術が、ついに日本の開発現場へ届くことになった。ロボットが感じた触覚を、遠隔操作者の指先にリアルタイムで伝える――。それは、AIが真の身体性を獲得するための重要な転換点となるかもしれない。(文=RoboStep編集部)
視覚の次は「触覚」。深センの先端ハードウェアが日本へ

(引用元:PR TIMES )
2026年1月16日、x-climb株式会社が中国・深センのロボティクススタートアップ「Daimon(Shenzhen) Robotics」との正規ディストリビューター契約締結を発表した。これにより、ロボットが物体に触れた際の反力や抵抗を遠隔操作者の指先に伝える、画期的な学習用システムが国内で利用可能となる。
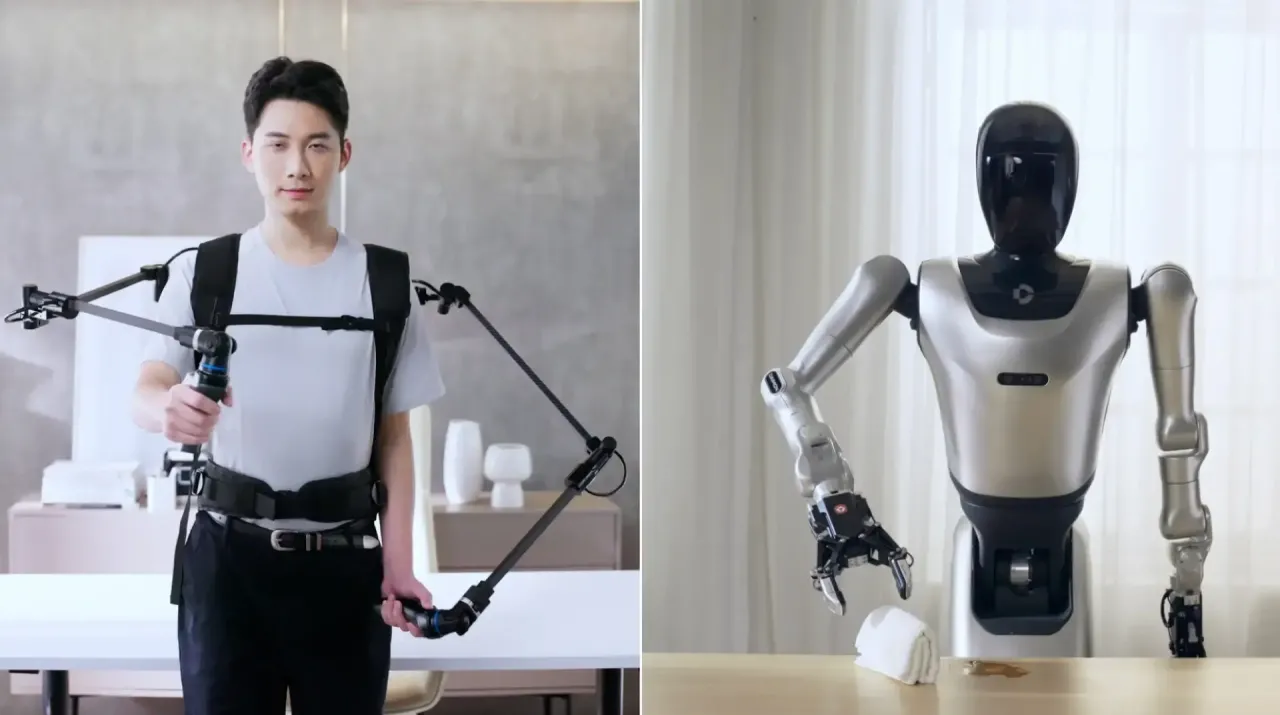
x-climbが国内優先供給枠を確保し、同日より販売を開始したのは、最新鋭システム「DM-EXton2」だ。これは、今年1月にアメリカ・ラスベガスで開催された、世界最大級のテクノロジー見本市「CES 2026」で発表されたばかりの製品である。この製品は、ヒューマノイドロボットの学習データ収集に特化した、世界初の「触覚フィードバック搭載テレオペレーションシステム」である。
従来の遠隔操作デバイスは、モニター越しの映像を見ながら操作する「視覚依存型」が主流だった。しかし、視覚だけでは「硬そうに見えるが実は柔らかい素材」などを扱う際に、適切な力加減を判断することが難しい。対して「DM-EXton2」は、ロボットのハンド部分に搭載された高解像度センサーが検知した圧力を、オペレーターが装着したウェアラブルデバイスを通じて物理的に再現する。ロボットが壁にぶつかれば手ごたえがあり、重いものを持てばその重量感が伝わる。これにより、操縦者はロボットと感覚を同期させ、繊細な「器用な操作」を直感的に教え込むことが可能になる。
(引用元:PR TIMES )
「モラベックのパラドックス」を超えるための身体性獲得
今回の提携が持つ潜在的なインパクトは、日本のロボット開発における長年の課題であった「身体性の欠如」を解決し、いわゆる「モラベックのパラドックス」を超える鍵になり得る点にある。
モラベックのパラドックスとは、「高度な推論はコンピュータにとって簡単だが、1歳児でもできるような知覚や運動スキルを機械に実行させるのは極めて難しい」という逆説である。近年、大規模言語モデルの登場によりAIの「知能」は飛躍的に向上した。しかし、その知能を物理的な身体に宿らせる「身体性AI」の領域では、依然としてこのパラドックスが壁となっていた。その要因は、AIに物理世界を教えるための「良質な教師データ」の不足にある。ここでいう教師データとは、AIに「正解を教えながら学ばせるための見本データ」 のことだ。
現在のロボット制御は、人間が操作したデータをAIに学習させる「模倣学習」が主流だ。しかし、視覚情報だけのデータセットでは、「どれくらいの強さで握っているか」という核心的な情報が抜け落ちてしまう。結果として、AIは「形」は真似できても「力加減」が分からず、作業に失敗してしまう。
触覚フィードバックを持つ「DM-EXton2」の導入は、この状況を一変させる。熟練のオペレーターが指先の感覚を頼りに行う「匠の技」や「微妙なニュアンス」を含んだ動作を、そのまま高品質な学習データとして記録できるからだ。

(引用元:PR TIMES )
深センという都市は、アイデアを形にするプロトタイピングの速度において世界を圧倒している。次々と生まれる新しいデバイスを、x-climbのようなプレイヤーがインフラとして整備し、日本の緻密なロボット制御技術に取り込むことは、国際競争力を維持する上で合理的だ。
今後、ロボットが活躍すべきフィールドは不確実性に満ちている。未知の物体に触れ、判断し、作用することが求められるとき、ロボットに必要なのは画素数だけでなく、指先の感覚であろう。「感覚」をデータ化し、それをロボットに継承させる。今回の提携は、身体性AIが実験室を飛び出し、実社会へと進出するための重要な一歩と言える。


- share
-

-

-



