- 総合TOP
- 宇宙
- AI
- ロボット
- WEB3・メタバース
ロボットティーチングとは、産業用ロボットに特定の作業や動きを直接触って教え再現させる、学習プロセスの1つです。製造現場で活躍する産業用ロボットを思い通りに動かすために不可欠な作業です。
どの条件の時に、どの順番で、どのような姿勢で動くべきかという細かな指示を与え、それを記憶させることが必要です。産業用ロボットの多くは、このティーチングによって「記録」された動作を「再生」することで作業を行う「ティーチングプレイバック方式」を採用しています。この工程なしには、ロボットの持つポテンシャルを引き出すことはできないのです。
併せて読みたい:今さら聞けない「ロボットの制御方法」~自動化を支える基本技術
4つの主なティーチング手法とその特徴
 (引用元:オムロン)
(引用元:オムロン)
ロボットに動作を教える方法は、大きく分けて4つあります。それぞれに特徴があり、導入する現場の規模や用途、求められる精度によって最適な方法が異なります。
オンラインティーチング
ティーチングペンダントと呼ばれる専用コントローラを使用し、実際にロボットを動かしながら各動作を記録する方法です。実機で確認しながら作業できるため精度が高く、細かな調整も可能です。ただし、作業中は生産ラインを停止する必要があり、教示時間がそのまま生産ロスにつながる点が課題となります。
オフラインティーチング
パソコン上で動作プログラムを作成し、そのデータをロボットに転送する方法です。3Dシミュレーションなどを活用して事前に動作検証ができ、生産ラインを止めずに準備作業が可能です。しかし、実機との誤差調整が必要な場合があり、高度なプログラミング知識も求められます。
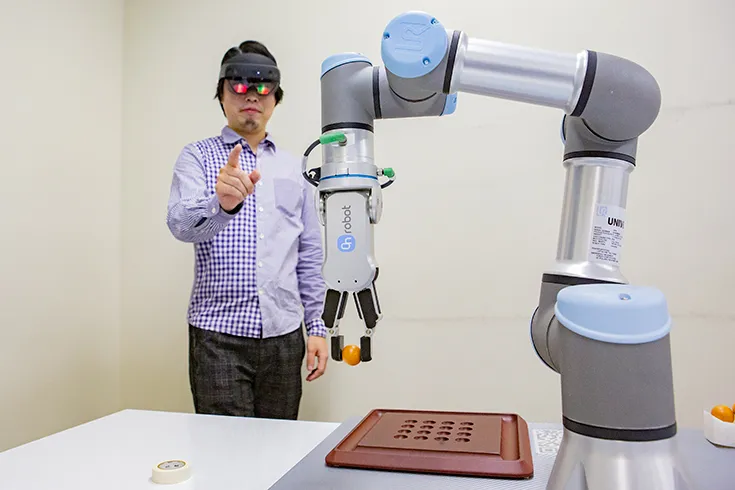
ダイレクトティーチング
人間がロボットのアームを直接手で動かし、その動きを記憶させる直感的な方法です。専門知識がなくても直感的に教示できるため、小規模工場や頻繁な変更が必要な現場で重宝されます。ただし、複雑な動作の教示には不向きで、オンラインティーチング同様に生産ラインを止める必要もあります。
AIを活用したティーチングレス
最新の手法として注目されているのが、AIの自己学習機能を活用した方法です。基本動作を教えた後は、ロボット自身が最適な動きを学習して進化します。初期投資は高いものの長期的には人件費削減につながり、環境変化にも柔軟に対応できる将来性を秘めています。
ロボットティーチングにおける課題と解決策
 (引用元:PROTRUDE)
(引用元:PROTRUDE)
ロボットティーチングには専門的な知識と技術を持った人材が必要であり、特に出力80W以上のロボットでは「産業用ロボットの教示等の業務に係る特別教育」の資格が求められます。また、細かな動作設定には多くの時間と工数がかかり、特にオンラインティーチングでは生産ラインへの影響も無視できません。
これらの課題に対しては、外部専門家の活用や教育プログラムの整備、オフラインとオンラインを組み合わせたハイブリッド手法の採用などが有効です。さらに、再利用可能なプログラムの標準化や類似作業へのテンプレート活用なども、ティーチングの効率化に貢献します。
効率的なティーチング実現のポイント
 (引用元:ロボスタ)
(引用元:ロボスタ)
効率的なティーチングを実現するには、自社の製造環境や生産規模に適した手法を選択することが重要です。例えば、小規模で多品種生産の現場ではダイレクトティーチングが、大規模かつ安定生産の環境ではオフラインティーチングが適しているケースが多いでしょう。
また、ロボットの移設や生産ラインの変更時に再ティーチングが必要になる点も考慮し、将来の変更を見越したデータ管理も重要です。投資対効果を高めるには、ティーチング工数や停止時間も含めた総合的なコスト計算と、適切な教育・訓練体制の構築が欠かせません。
ロボットティーチングの手法も日進月歩
ロボットティーチングは産業用ロボット活用の成否を左右する重要なプロセスであり、製造業の生産性向上に直結します。オンライン、オフライン、ダイレクト、AIという4つの手法それぞれの特性を理解し、自社の環境に最適なアプローチを選択することが成功への近道です。
技術の進化とともにティーチングのあり方も変わりつつあり、特にAIを活用したティーチングレスは将来の標準となる可能性を秘めています。人とロボットが理想的に協働する製造現場の実現に向けて、効率的なティーチング手法の採用が求められているのです。


- share
-

-

-



