- 総合TOP
- 宇宙
- AI
- ロボット
- WEB3・メタバース
製造現場で注目を集める「協働ロボット(Cobot、Collaborative Robot=コボット)」。従来のロボットと違い、人間と同じ空間で安全に働ける新しいタイプのロボットです。この安全な協働を実現するのが「安全機能」です。本記事では、協働ロボットの安全機能の基本と活用ポイントを解説します。
協働ロボットの安全機能が注目される背景
 (引用元:オムロン)
(引用元:オムロン)
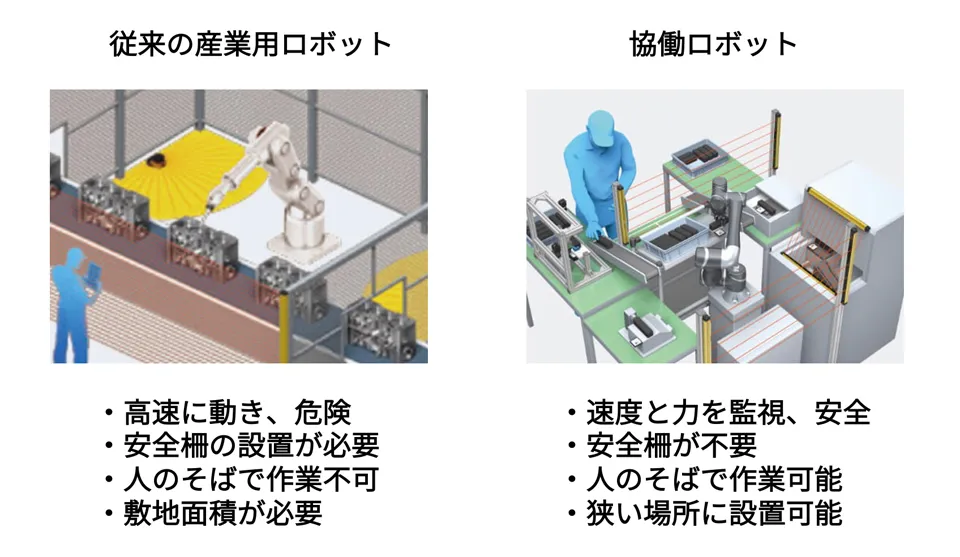
従来の産業用ロボットは安全柵で囲い、人から隔離する必要がありました。これに対し協働ロボットは、人間との協働作業を前提に設計されています。そのため、限られたスペースでの導入や、ロボットの作業と人の作業を同じ空間で行う柔軟な生産が可能になりました。
多品種少量生産や頻繁な生産ライン変更が必要な現場では、人の柔軟性とロボットの正確性を組み合わせる需要が高まっています。協働ロボットの安全機能は、こうした現代の製造現場のニーズに応える大きな武器となっています。特に日本では、2013年の規制緩和により、安全柵なしでの運用が認められるようになりました。
安全な導入のアプローチ
 (引用元:キーエンス)
(引用元:キーエンス)
導入においては、人との安全な協働を実現する4つの主要なアプローチがあります。これらを理解することで、現場に最適な導入方法が見えてきます。
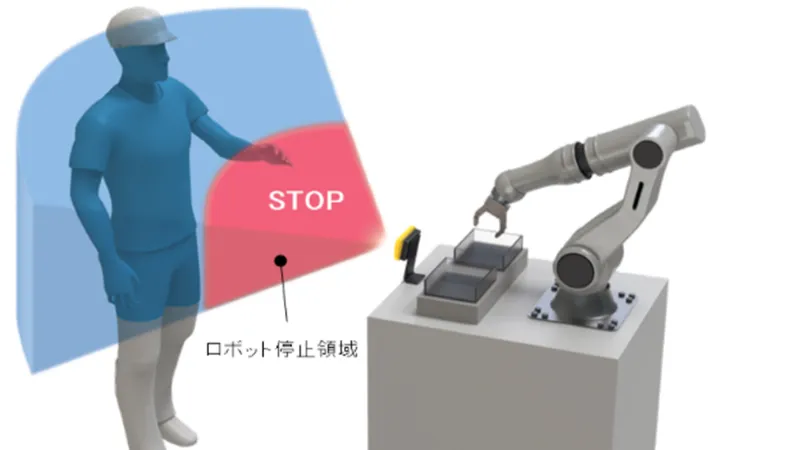
安全適合監視停止
人がロボットの作業エリアに入る前に、自動的にロボットを停止させる機能です。作業者がエリアを離れると、ロボットは自動的に作業を再開します。部品の取り付けや検査など、一時的にロボットの作業を中断する場面で活用されます。毎回システム全体をシャットダウンする必要がなくなり、効率的な作業が可能になります。
ハンドガイド
人間がロボットを直接持って動かせる機能です。ロボットの腕を実際に動かしながら作業内容を教えることができるため、専門知識がなくてもプログラミングが可能になります。また、重量物の持ち上げ補助など、人とロボットが力を合わせる作業にも適しています。
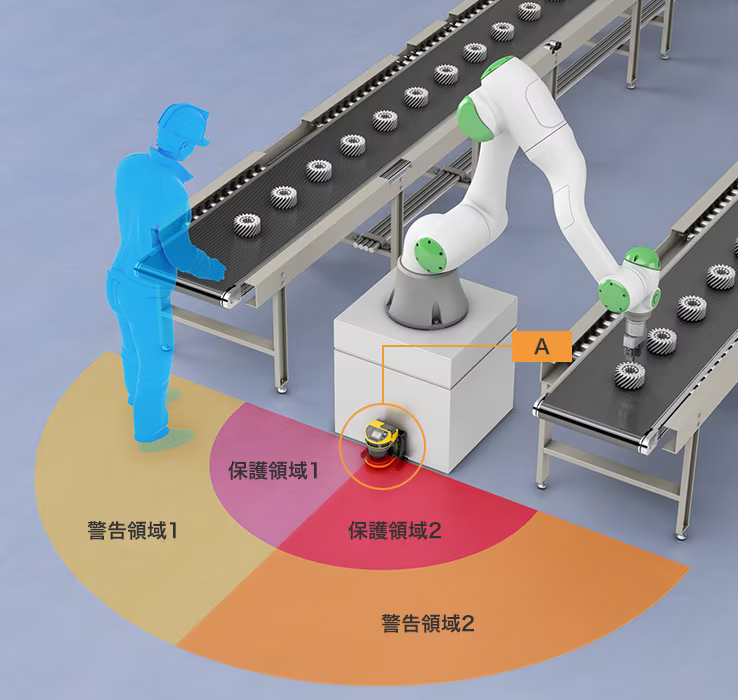
速度と距離の監視
ロボットと人間の距離を常に監視し、安全な距離と速度を保つ機能です。人が近づくと自動的に速度を落とし、さらに接近すると停止します。これにより、作業の中断を最小限に抑えながら安全性を確保できます。
力と圧力の制限
協働ロボットの最も基本的な安全機能です。異常な力や圧力を検知すると即座に停止します。また、丸みを帯びた形状や衝撃吸収パッドなど、接触時の安全性を高める設計も採用されています。これらの設計は国際安全規格に基づいており、人体の各部位ごとに許容される接触圧力が定義されています。
安全機能を実現する仕組み
 (引用元:ロボットダイジェスト)
(引用元:ロボットダイジェスト)
協働ロボットの安全機能は、高度なセンサー技術と安全を考慮した設計によって支えられています。内蔵されたセンサーが異常な力を検知したり、カメラが周囲の状況を把握したりすることで、安全な動作を実現しています。
また、丸みを帯びた形状や軽量設計により、万が一、人とロボットが接触しても怪我のリスクを減らす工夫がされています。こうしたセンサーによる監視機能と安全に配慮した形状設計の組み合わせが、協働ロボットの安全性を支えているのです。
安全性と生産性を両立するコボットの可能性
協働ロボットの安全機能は、「人間とロボットが一緒に働く」という新しい生産スタイルを可能にしました。従来は自動化が難しかった工程や中小企業の製造現場でも、ロボット導入の可能性が広がっています。
人間の創造性とロボットの正確性を組み合わせた生産システムは、これからの製造業に新たな可能性をもたらすでしょう。最適な安全機能を選び、現場に合った形で導入することが活用の成功につながります。


- share
-

-

-



