- 総合TOP
- 宇宙
- AI
- ロボット
- WEB3・メタバース
自律的に動くロボットや車両を実現するには、「(ロボット自身が)今どこにいるのか」を把握する自己位置推定と、「周囲の環境はどうなっているのか」を理解する環境地図作成が不可欠です。
ロボットが自分の位置と周囲環境を同時に把握するSLAM(Simultaneous Localization and Mapping)は、この両方を同時に実現します。障害物を自動で避ける機能は、ロボットにとって当たり前となっている今ですが、意外と用語について知らない方も多いのではないでしょうか。本記事では、SLAM技術の基本的な仕組みや種類について、分かりやすく解説しながら、改めておさらいしていきます。
特に近年ではコンピューターの処理能力向上やセンサーの低価格化により、従来は研究室レベルだったSLAM技術が、その活用フィールドを広げています。GPSが届かない屋内や地下で利用できる点も、この技術の普及を推し進める要因となっています。製造現場での無人搬送車(AGV)から家庭用掃除ロボット、最先端の自動運転まで、さまざまな分野で活用が広がる技術を学んでいきましょう。
SLAMの基本的な仕組み
 (引用元:テクノプロ・デザイン)
(引用元:テクノプロ・デザイン)
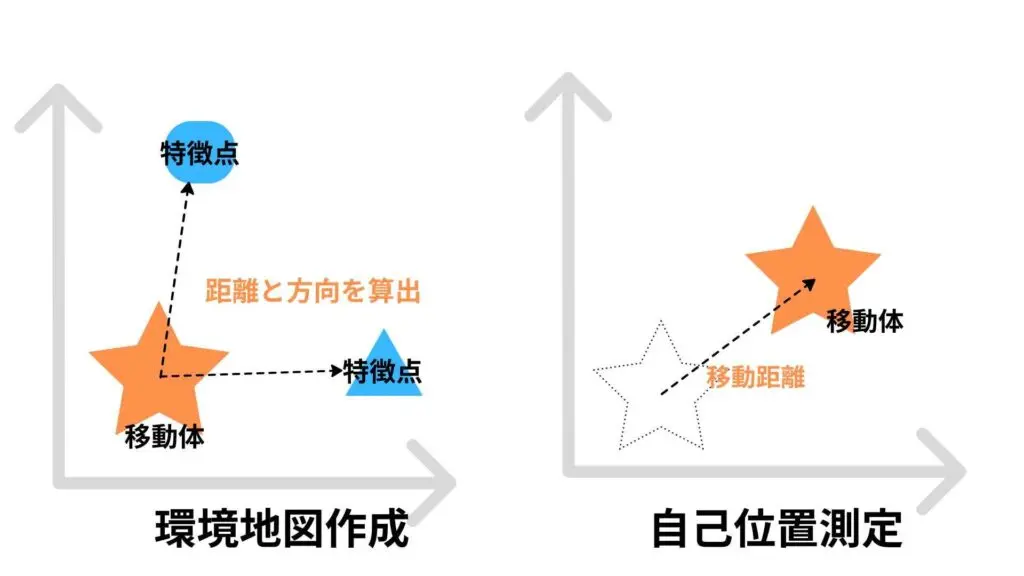
SLAMは、自己位置推定と環境地図作成という2つの処理を同時に行う技術です。初めて訪れる場所でも、ロボットは周囲の特徴を捉えながら移動し、自分の位置と環境の地図を徐々に構築していきます。
自己位置推定と環境地図作成の同時実行
例えば、お掃除ロボットを例にとってみましょう。SLAMを搭載していない従来のロボットは、ランダムに部屋の中を動き回り、非効率な清掃を行います。一方、SLAMを搭載したロボットは、センサーから得た情報をもとに自分の位置を把握しながら、同時に部屋の地図を作成します。これにより、清掃済みの場所を記憶し、効率的に部屋全体を掃除できるようになります。
SLAMの処理では、移動体に搭載されたセンサーから得られる情報を基に、周囲にある壁や物体などの特徴点(ランドマーク)を検出します。そして、移動に伴うこれらのランドマークとの相対位置の変化から、自分がどれだけ移動したかを推定します。同時に、検出したランドマークの情報を積み重ねることで、環境の地図を構築していきます。
SLAMが解決する課題
従来、自己位置推定にはGPSが広く利用されてきました。しかし、GPSは建物内や地下などでは利用できないという大きな制約がありました。また、事前に詳細な地図が用意されていない場所では、自動運転や自律移動が困難でした。
SLAMはこれらの課題を解決し、GPSが届かない環境でも、また事前の地図がなくても、自律的な移動を可能にします。これにより、倉庫内の無人搬送車、ビル内の清掃ロボット、災害現場での探査ロボットなど、さまざまな用途での活用が広がっています。
SLAMの3つの主要タイプ
 (引用元:マクニカ)
(引用元:マクニカ)
SLAMは使用するセンサーによって大きく3つのタイプに分けられます。それぞれに特徴があり、用途や予算に応じて最適なタイプを選択することが重要です。
LiDAR SLAM - 高精度な距離測定を実現
LiDARと呼ばれるレーザーセンサーを利用したSLAMです。レーザー光を照射し、反射して戻ってくるまでの時間から距離を測定します。高い測距精度と広い検知範囲が特徴で、自動運転車や高精度な自律移動が求められる業務用ロボットなどで利用されています。
LiDAR SLAMの利点は、壁や床が単色で特徴が少ない環境や暗所などでも、安定して動作する点です。レーザーの反射を利用して距離を直接測定するため、カメラのように照明条件や視覚的な特徴に左右されません。一方で、LiDARセンサー自体のコストが比較的高いことや、センサーが検出する大量の距離情報(数万~数十万の点の集まり)の処理に高い計算能力が必要なことなどが課題となっています。
Visual SLAM - カメラ画像で周囲を認識
カメラの画像を利用したSLAMです。単眼カメラやステレオカメラなど、さまざまなタイプのカメラが使用されます。画像から特徴点を抽出し、その移り変わりから自己位置と環境を推定します。カメラは比較的安価で情報量が多いため、コストパフォーマンスに優れたソリューションとして注目されています。
Visual SLAMは、色や形状の特徴が豊富な環境では高い性能を発揮します。また、人や物体など、画像から得られる他の情報と組み合わせることで、より高度な機能を実現できます。ただし、照明条件に左右されやすく、特徴の少ない壁や床などでは性能が低下する傾向があります。
Depth SLAM - 深度情報を活用
Depth SLAMは、深度センサーから得られる距離情報を利用したSLAM技術です。これらのセンサーは、対象物までの距離を直接計測できる特殊なカメラで、スマートフォンの顔認証や最新の掃除ロボットにも搭載されています。物体までの距離を直接測定できるため、Visual SLAMが苦手とする壁や床が単色で特徴が少ない環境や、明るさが急に変わるような照明条件の変化にも強いという特徴があります。
特に、RGB-Dカメラ(色情報と深度情報を同時に取得できるカメラ)を利用したSLAMは、Visual SLAMとDepth SLAMの利点を組み合わせた方式として、家庭用ロボットや小型の業務用ロボットなどに広く採用されています。物体の色や形状に加えて距離情報も利用できるため、より正確な環境認識が可能になります。
SLAMがもたらすロボットの自律性革命
SLAMは、さまざまなセンサーを活用して自己位置推定と環境地図作成を同時に行うことで、ロボットの自律性を飛躍的に高めています。LiDARの正確な距離測定、カメラの豊富な視覚情報、深度センサーの直接的な距離計測といった特長を組み合わせることで、より幅広い環境での安定した動作が実現しつつあります。
今後は、センサー技術の発展と計算処理の効率化により、より小型で低コストなSLAMシステムが登場すると予想されます。ロボットの「見る力」と「位置を知る力」は、これからの産業や生活のあり方を大きく変えていくでしょう。


- share
-

-

-



