- 総合TOP
- 宇宙
- AI
- ロボット
- WEB3・メタバース
2025.03.13
月面でAIロボットが活躍する未来は近い!?~「ムーンショット目標3 吉田プロジェクト」MoonBotのデモで分かった研究開発の今
2025年3月12日、JAXA(宇宙航空研究開発機構)相模原キャンパス 宇宙探査実験棟・宇宙探査フィールドで「自己再生型AIロボット」のデモが行われた。ムーンショット目標3吉田プロジェクトの研究開発の成果をプレス向けに初めて公開されたもので、多くの報道陣が現地でシャッターを切った。2050年までには月面での持続的な資源利用拠点や有人滞在拠点が構築できるAIロボットシステムを目指す同プロジェクトの現在地とは。(文=SpaceStep準備室)
2050年までに月面に未来都市を作ることが目標
ムーンショット目標とは、将来の社会課題を解決するために、人々の幸福で豊かな暮らしの基盤となる3つの領域(社会、環境、経済)から、具体的な10個の目標を決定したものだ。例えば「ムーンショット目標1」では「2050年までに、人が身体、脳、空間、時間の制約から解放された社会を実現」といった目標だ。
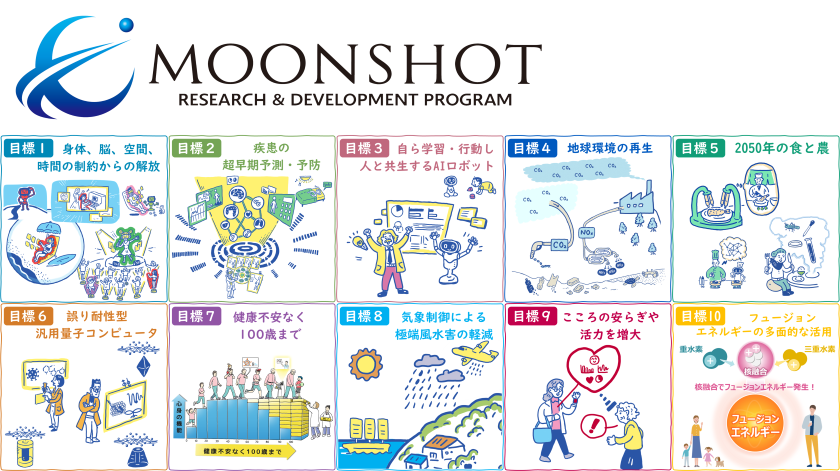
こうした10の目標を達成すべく、政府により設けられたプログラムが「ムーンショット型研究開発制度」。日本発、破壊的イノベーションの創出を目指し、従来技術の延長にない、より大胆な発想に基づく挑戦的な研究開発(ムーンショット)を推進する大型研究プログラムだ。
今回デモが行われたプロジェクトは、「ムーンショット目標3(2050年までに、AIとロボットの共進化により、自ら学習・行動し人と共生するロボットを実現)」の達成に向け、研究開発が進んでいる取り組みの一つだ。開発に取り組むのは、プロジェクトマネージャー(PM)である東北大学の 吉田 和哉 教授を筆頭とした、課題推進者(PI)の大阪工業大学の 松野 文俊 教授、京都大学の 森本 淳 教授、東京理科大学の 木村 真一 教授、産業技術総合研究所の 山野辺 夏樹 上級主任研究員らによる研究グループ。吉田教授は「私たちは2050年までに月面に未来都市を作ることを目標としています」と未来を見据え、プロジェクトの意欲を語った。
 東北大学 大学院工学研究科 吉田 和哉 教授
東北大学 大学院工学研究科 吉田 和哉 教授
吉田プロジェクトのテーマは「月面探査/拠点構築のための自己再生型AIロボット」だ。月面において、未到探査及び拠点構築を行う担い手として、再構成が可能な変幻自在なAIロボットシステムを提案し、その実現に向けた研究開発を行っている。現在、月への輸送機会が限られていたり、月面特有の作業環境があったりするなかで、変幻自在なAIロボットを確立すれば、月面探査や拠点構築をロボットが担うことができ、持続的な有人活動拠点の実現に向け大きく前進すると吉田教授は語る。
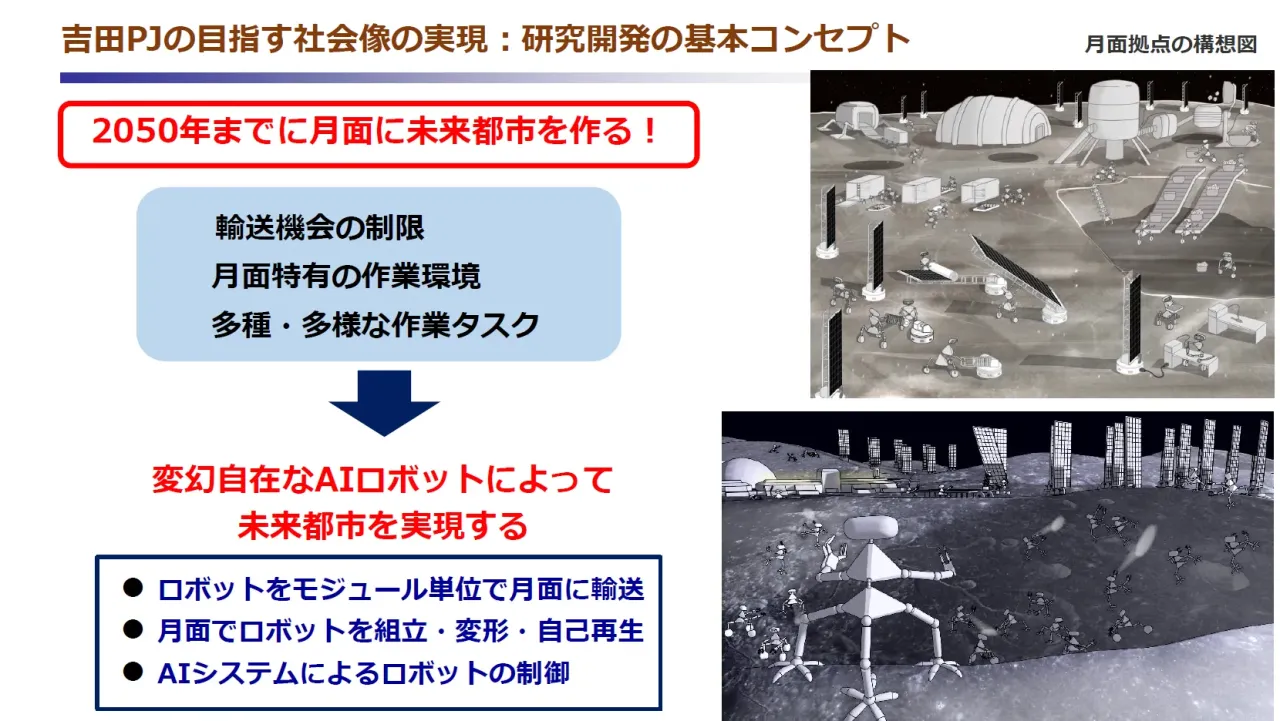
吉田プロジェクトの研究開発基本コンセプト(提供:東北大学 吉田 和哉 教授)
月面でロボットをロボットが組み立てる
「これまで多くの探査ミッションでは、完成したロボットを運んでいましたが、私たちはロボットモジュール(構成要素)を運び、現地でロボットを組み立てる計画を立てています。完成されたロボットではなく、アームや車輪などの基本要素となるモジュールを月に送り、AI技術を用いて自律的に組み立てることで、現場の状況やミッションに柔軟に対応可能な変幻自在のロボットの実現を目指します。また、これらのロボットが互いに協働し、自律的に任務を遂行する未来像を描いています。
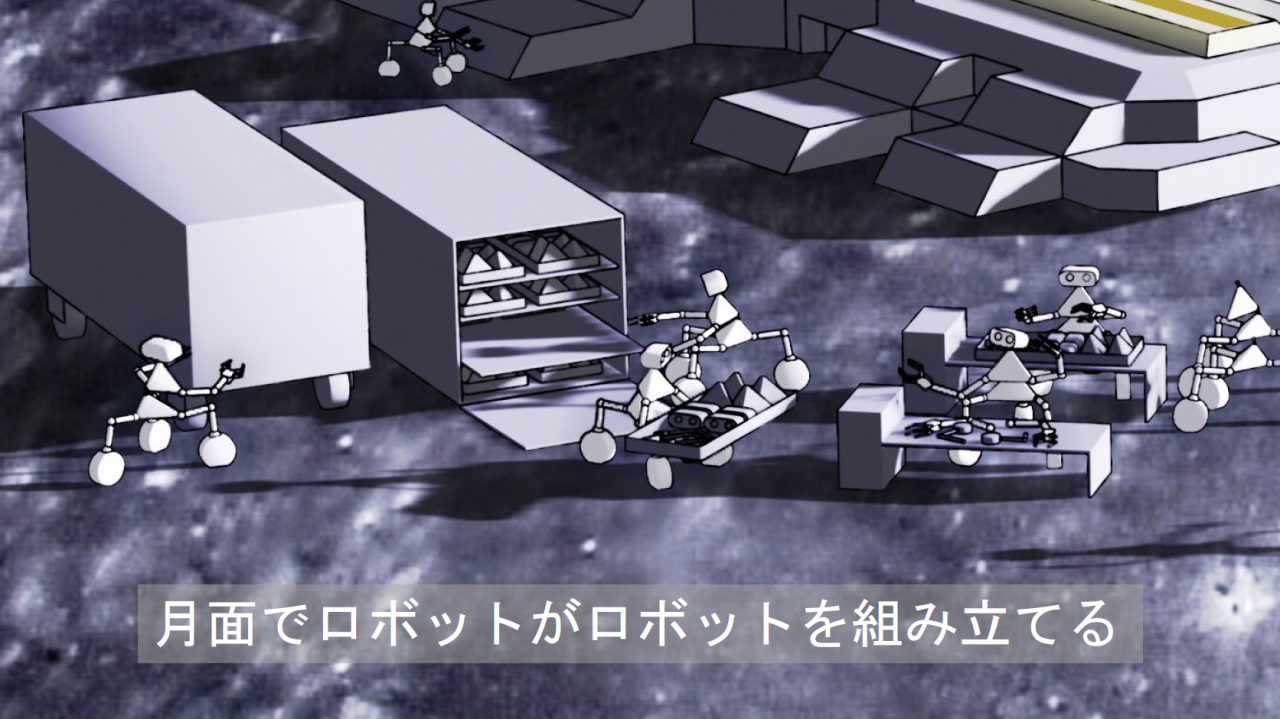 目指すのは月面でロボットがロボットを組み立てる世界だ(提供:東北大学 吉田 和哉 教授)
目指すのは月面でロボットがロボットを組み立てる世界だ(提供:東北大学 吉田 和哉 教授)
2025年度までのマイルストーンとしては、ロボットモジュールを自身あるいは他のロボットにより着脱できること、移動環境に応じて適切な移動様式や形態を選択してモジュール組み換えを行い、ミッションを遂行できること、複数台のロボットを用いて障害物のある不整地上での大型の対象物を協調搬送し、構造物の展開・組み立てができることなどを、地上実証することです。2030年までには、月面という特殊環境のもとで機能する『モジュラー型AIロボットの宇宙フライトモデルを開発し、これらのロボットを用いた『AIロボットによる月面拠点の実現』に向けた、初期実証ミッションを月面で実施することを目指しています」(吉田教授)
 2050年には月面での探査と資源活用が促進され、持続的な有人活動拠点が月に整備される、そんな未来がやってくるのか(提供:東北大学 吉田 和哉 教授)
2050年には月面での探査と資源活用が促進され、持続的な有人活動拠点が月に整備される、そんな未来がやってくるのか(提供:東北大学 吉田 和哉 教授)
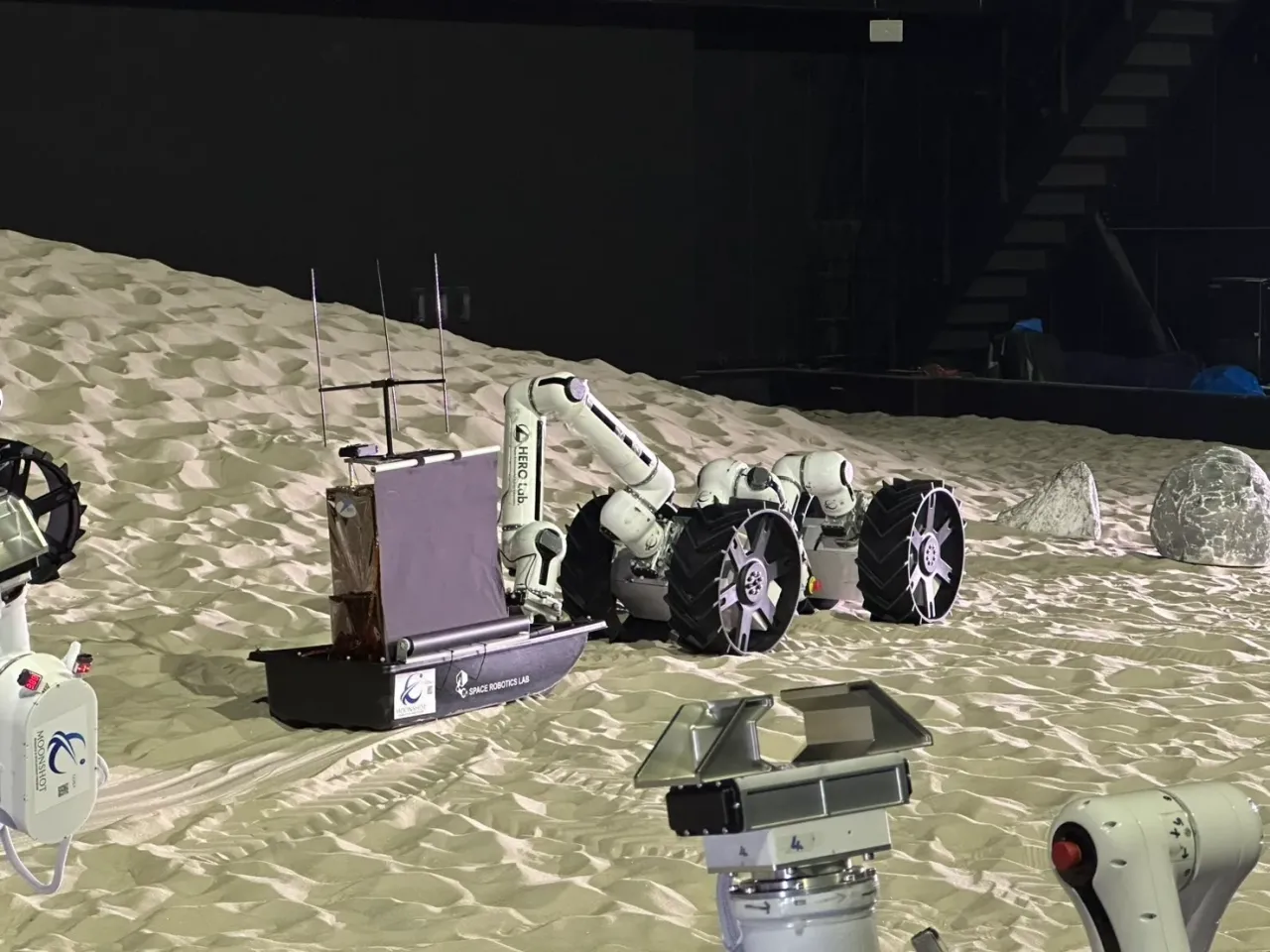
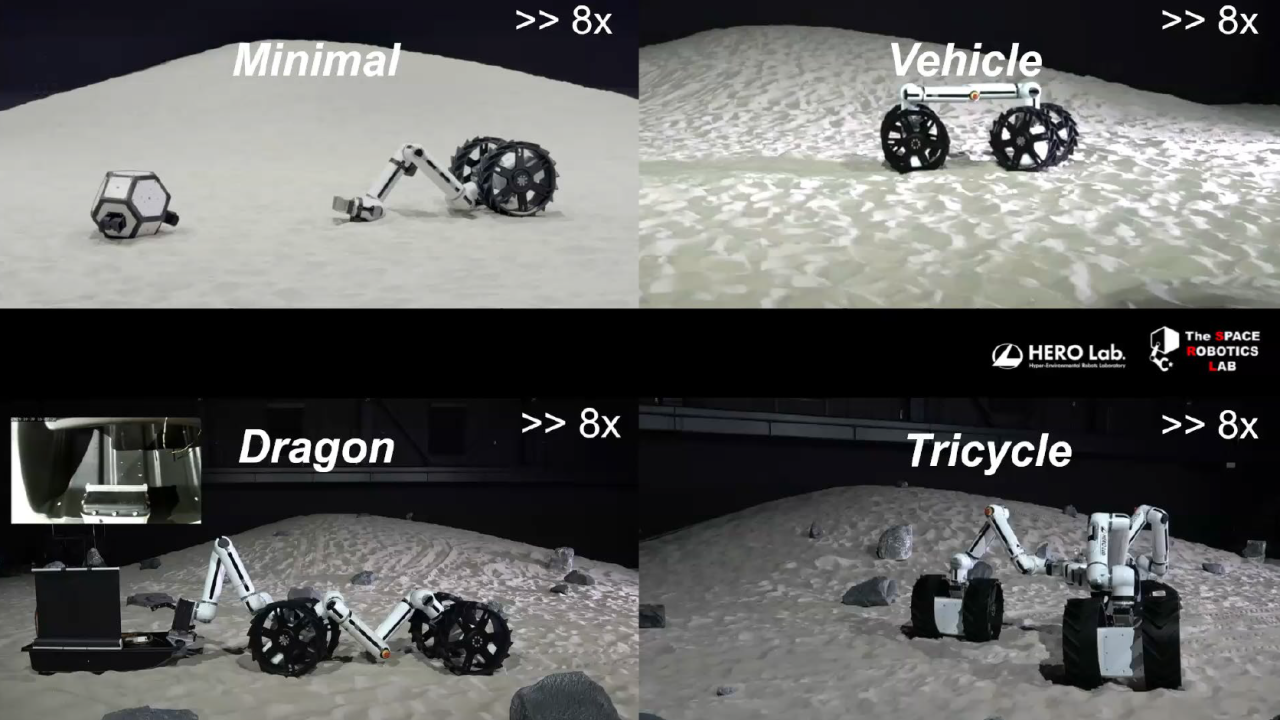
デモは、JAXA相模原キャンパス内の宇宙探査フィールドで地上実験用のモジュラー型AIロボット「MoonBot」の試作機を使い、行われた。変幻自在の名の通り、「Minimal」や「Dragon」と名付けられた形態に変形する様子や、実際に資材を搬送したりする実験が披露された。

 JAXA相模原キャンパス宇宙探査実験棟にある宇宙探査フィールドでデモが行われた
JAXA相模原キャンパス宇宙探査実験棟にある宇宙探査フィールドでデモが行われた
 現場の状況やミッションにあわせ、最適なモジュールを組み合わせる(提供:東北大学 吉田 和哉 教授)
現場の状況やミッションにあわせ、最適なモジュールを組み合わせる(提供:東北大学 吉田 和哉 教授)
Dragonの形態で資材が運ばれる様子
AIロボットは、ロボットが互いに協働し、自律的に任務を遂行する未来像が描かれており、AIも欠かせない技術要素だ。ロボット自らがAIで学習し、土木作業や与圧構造物の展開・組み立てなど様々な作業を自律的にできることを目指す。
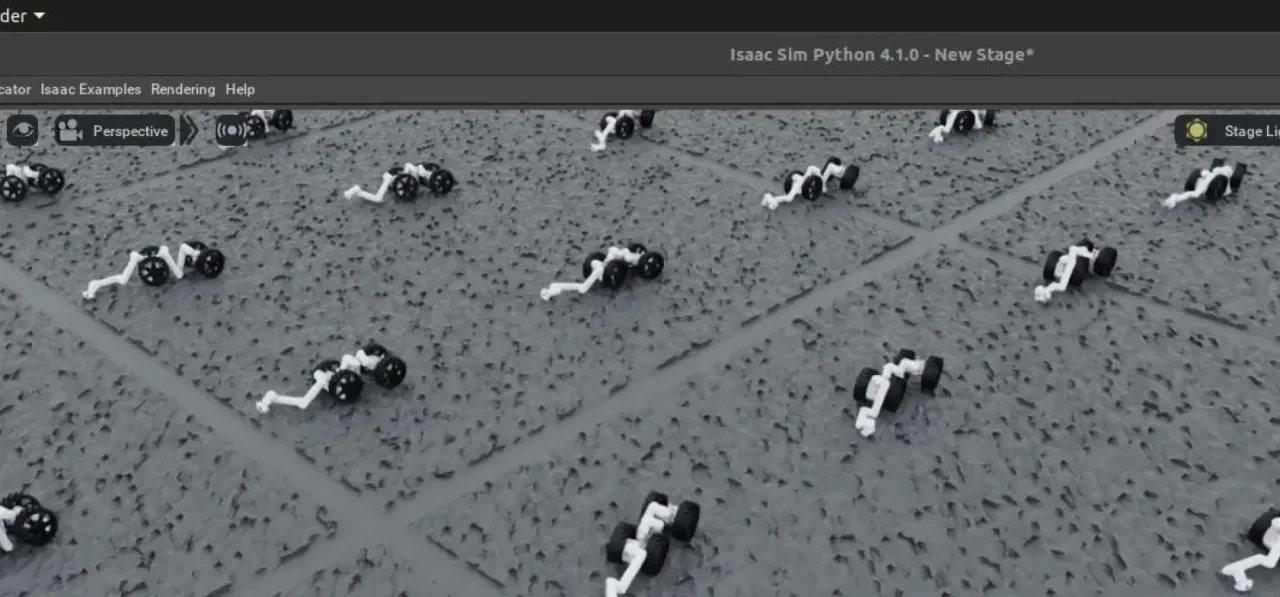
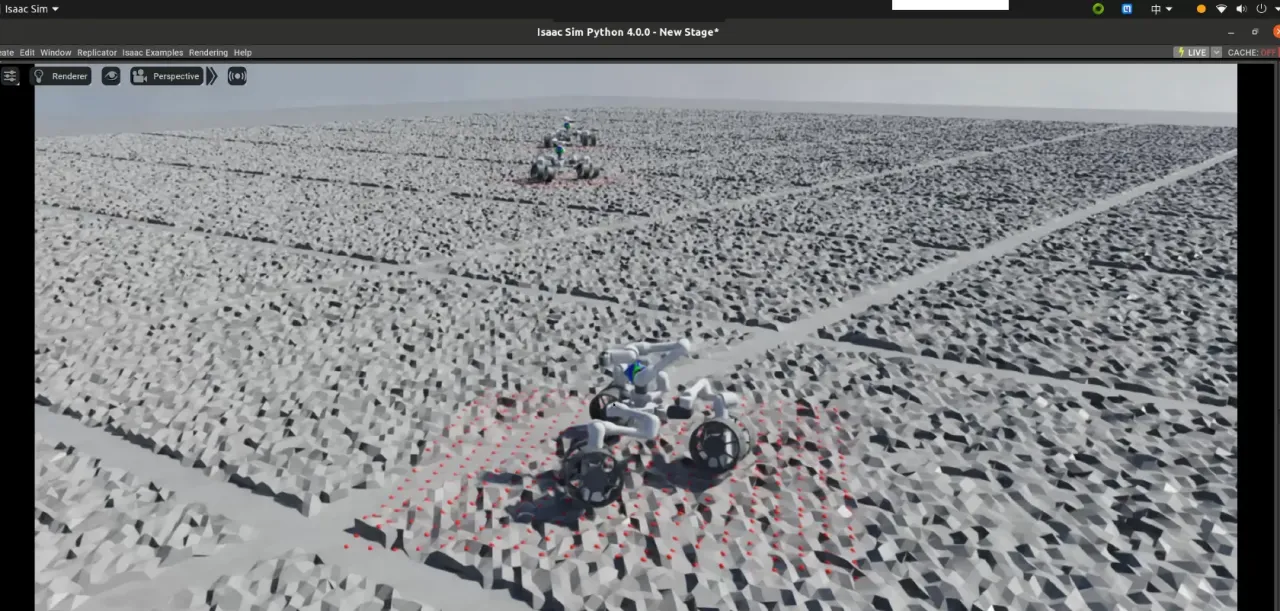 機械学習により賢くなるロボット(提供:東北大学 吉田 和哉 教授)
機械学習により賢くなるロボット(提供:東北大学 吉田 和哉 教授)
今回披露されたモジュラー型AIロボット「MoonBot」の試作機は、2025年日本国際博覧会(大阪・関西万博)での展示・実演も予定しているという。



- share
-

-

-



